2016/07/11(月) [n年前の日記]
#1 [nitijyou] 工具箱の中から謎のICを発掘
工具箱の中を漁っていたら、学生時代に購入したと思われる謎のICが出てきた。
A-Dコンバータだけは、何に使おうとしてたか分かるけど。8bit PC の SHARP X1 に繋いで、PCM録音をしようとしていた、ような気がする。今はもう、あらゆるPCについてる録音機能だけど。当時、そんな機能はPCについてないのが当たり前だったのです…。そもそもメモリが64KBとかそんなんだったし…。
- 東芝 TA7257P (2個) … DCモータドライバらしい。
- Mitsubishi 734000 M54542L … これもDCモータドライバらしい。
- 東芝 TC4538BP 8651H … リトリガ動作、リセット動作の可能な単安定マ ルチバイブレータ、と書いてあるが…。
- 東芝 TC4584BP 8705H … 6回路入りシュミットトリガー入力インバーター、らしいが…何だソレ。
- Mitsubishi 7214LF M74LS04P … よく分からない
- AD670JN … 8bit A-Dコンバータ、らしい。
A-Dコンバータだけは、何に使おうとしてたか分かるけど。8bit PC の SHARP X1 に繋いで、PCM録音をしようとしていた、ような気がする。今はもう、あらゆるPCについてる録音機能だけど。当時、そんな機能はPCについてないのが当たり前だったのです…。そもそもメモリが64KBとかそんなんだったし…。
[ ツッコむ ]
#2 [pc] 携帯ゲーム機にGPIOがついてたらもうちょっと違ったのだろうか
GPIOてのは、「汎用I/Oポート」のことらしいけど。「I/O」は「Input/Output」の略。入出力、ってことですが。
_マイコン活用基礎:周辺機能を学ぼうー(1)GPIO | ルネサス エレクトロニクス
Raspberry Pi や Arduino 関係の記事を眺めていると、なんだかモヤモヤしてくる時が。自分達の身の回りに、持ち歩ける小さなコンピュータがこれだけ普及してる時代なのに。どうしてわざわざ、新規に Raspberry Pi なり Arduino なり、その手のコンピュータを導入しないと、そういうことができないのかなと。自分のような貧乏人の部屋にすら、小さくて持ち運べるコンピュータが埃を被ってゴロゴロ転がってるというのに…。そいつらだって、LEDを光らせたり、モータ制御する程度のスペックなら、十分に持ってるはずなのに…。
例えばスマホに、いや、ガラケーに、あるいはノートPCでもいいけど、GPIOに相当する何かが用意されてたら、そのコンピュータを流用して色々できたのかもしれないよなと…。
ニンテンドーDSに、あるいは PS Vita に、そういう何かがついてたら、巷に溢れてる「Raspberry Pi (Arduino) を使って○○しよう!」的な記事は、そのほとんどが「ニンテンドーDS (PS Vita)を使って○○しよう!」という記事として公開されていた、かもしれず。
今はもう青息吐息気味なコンパクトデジカメの市場だって、ユーザが書いたプログラムを動かして好きなように画像処理までできますよ、みたいな点が早い時期から売りだったりしたら、例えば電動雲台をデジカメから制御しちゃう事例が出てきたりなんかして、もうちょっと展開が違ってたかもしれない、などと夢想したりもして。原発事故現場に潜っていったロボットの頭脳部分には、Canon製デジカメやSONY製デジカメが鎮座ましましていたり、とか。
enchantMOONだってGPIOがついてたら、Raspberry Pi の位置にどっしりと enchantMOON が座り込む状況に…。いや、価格からしてソレは無理か…。
まあ、どれもこれも、今更どうしようもないのだけど。
本当にそうだろうか。今は死にかけているジャンルの製品に、そういう機能をつけてみたら、少しは息を吹き返したり…。甘いかな。甘いだろうな。そういうアレコレって、端子一つすら削りたい世界なのだろうし。
_マイコン活用基礎:周辺機能を学ぼうー(1)GPIO | ルネサス エレクトロニクス
Raspberry Pi や Arduino 関係の記事を眺めていると、なんだかモヤモヤしてくる時が。自分達の身の回りに、持ち歩ける小さなコンピュータがこれだけ普及してる時代なのに。どうしてわざわざ、新規に Raspberry Pi なり Arduino なり、その手のコンピュータを導入しないと、そういうことができないのかなと。自分のような貧乏人の部屋にすら、小さくて持ち運べるコンピュータが埃を被ってゴロゴロ転がってるというのに…。そいつらだって、LEDを光らせたり、モータ制御する程度のスペックなら、十分に持ってるはずなのに…。
例えばスマホに、いや、ガラケーに、あるいはノートPCでもいいけど、GPIOに相当する何かが用意されてたら、そのコンピュータを流用して色々できたのかもしれないよなと…。
ニンテンドーDSに、あるいは PS Vita に、そういう何かがついてたら、巷に溢れてる「Raspberry Pi (Arduino) を使って○○しよう!」的な記事は、そのほとんどが「ニンテンドーDS (PS Vita)を使って○○しよう!」という記事として公開されていた、かもしれず。
今はもう青息吐息気味なコンパクトデジカメの市場だって、ユーザが書いたプログラムを動かして好きなように画像処理までできますよ、みたいな点が早い時期から売りだったりしたら、例えば電動雲台をデジカメから制御しちゃう事例が出てきたりなんかして、もうちょっと展開が違ってたかもしれない、などと夢想したりもして。原発事故現場に潜っていったロボットの頭脳部分には、Canon製デジカメやSONY製デジカメが鎮座ましましていたり、とか。
enchantMOONだってGPIOがついてたら、Raspberry Pi の位置にどっしりと enchantMOON が座り込む状況に…。いや、価格からしてソレは無理か…。
まあ、どれもこれも、今更どうしようもないのだけど。
本当にそうだろうか。今は死にかけているジャンルの製品に、そういう機能をつけてみたら、少しは息を吹き返したり…。甘いかな。甘いだろうな。そういうアレコレって、端子一つすら削りたい世界なのだろうし。
[ ツッコむ ]
2016/07/12(火) [n年前の日記]
#1 [anime] 仮面ライダーアマゾンズ、1〜2話を視聴
BSで放送が始まったらしいので見てみたり。おお…ちょっとアダルト向きっぽい作り、のような…。最近の平成ライダーはどちらかというと子供向け気味になってた気がするので、自分のようなおじさんにとっては、なんだか嬉しい方向性だなと。や、ニチアサ版も好きですが。
1〜2話は石田監督担当で、そのせいか映像もなんだかソレっぽくてイイ感じ。しかも小林靖子脚本。完璧や…。
オリジナル版は子供の頃に見たままそれっきりだったのでよく覚えてないけど、モグラ怪人が懐かしい…。登場時に「なるほどなあ…」と感心を。そういう配置か…。
興味が湧いてググってみたら、ネット配信版で含まれてた刺激性の高いシーンは、TV放送版でカットされていると知り。ネット配信には、そんな強みもあったのかと…。
1〜2話は石田監督担当で、そのせいか映像もなんだかソレっぽくてイイ感じ。しかも小林靖子脚本。完璧や…。
オリジナル版は子供の頃に見たままそれっきりだったのでよく覚えてないけど、モグラ怪人が懐かしい…。登場時に「なるほどなあ…」と感心を。そういう配置か…。
興味が湧いてググってみたら、ネット配信版で含まれてた刺激性の高いシーンは、TV放送版でカットされていると知り。ネット配信には、そんな強みもあったのかと…。
[ ツッコむ ]
2016/07/13(水) [n年前の日記]
#1 [raspberrypi] Raspberry Pi3が届いた
数日前に Raspberry Pi3その他を注文していたのだけど、今日の昼ちょっと過ぎに届いた。
_Raspberry Pi てのは、手のひらサイズのコンピュータ。元々は教育用として企画されたけど、サイズやスペックがイイ感じだったので、電子工作やら制御やら、もっと色々な使い道があるんじゃないのと、あちこちでワイワイやってる製品、てな感じの説明でいいのだろうか。
_Raspberry Pi てのは、手のひらサイズのコンピュータ。元々は教育用として企画されたけど、サイズやスペックがイイ感じだったので、電子工作やら制御やら、もっと色々な使い道があるんじゃないのと、あちこちでワイワイやってる製品、てな感じの説明でいいのだろうか。
◎ 入手にかかった期間。 :
ショップのサイトで注文したのが日曜の夜。振り込んだのが月曜の朝。月曜の午後には「長野郵便局に配送を頼んだよ」と連絡メールが来て。水曜日の昼過ぎに配達してもらえた。要は、そのくらいの期間で届いたよ、ということでメモ。
てっきり宅急便っぽい箱で届くのかと思ってたけど、郵便ポストに入る程度の薄い箱で届いていたので驚いた。つまりはそれだけ、Raspberry Pi関連製品は小さいよ、ということだなと…。
てっきり宅急便っぽい箱で届くのかと思ってたけど、郵便ポストに入る程度の薄い箱で届いていたので驚いた。つまりはそれだけ、Raspberry Pi関連製品は小さいよ、ということだなと…。
◎ 届いた品をメモ。 :
今回は
_KSY
さんで、以下の品を注文。

計13,662円(税込)。cameraモジュールも注文してしまったので、ちょっと高くなったけど。本体+ケース+電源等の基本製品だけなら9,000円台で揃うはず。というかセットで売ってるからソレを選んだほうがいいと思うけど。
ただ、ちょっと問題が。USB電源アダプタに、USB電源ケーブルがついてくるはずだけど。ケーブルが入ってない…。全部の箱を開けて確認してみたけど、やっぱり入ってない…。
USB電源ケーブルは別売りだったのかなと不安に思って、 _USB電源アダプター 5V/2.5A/1P のページを再確認してみたけど、「USB電源ケーブル付属」と書いてあるよな…。これはたぶん、梱包ミスだな…。
とりあえず、KSYさんにメールでその旨連絡を入れておいたけど、どうなることやら…。「あらまあゴメンナサイ」で済んでくれればいいけど…。
※ 2016/0716追記。KSYさんから別途USB電源ケーブルが届いた、とメモ。対応してくれてありがとう、なのです。
- Raspberry Pi 3 Model B ... 5,670円
- Piケース RS for 3/2/B+ 白 ... 972円
- USB電源アダプター 5V/2.5A/1P ... 1,620円
- Raspberry Piシリーズ用ヒートシンク セット ... 540円
- microSDHC Team製 16GB CLASS10 ... 1,080円
- Piカメラ Official V2 for 3/2/1 ... 3,780円
計13,662円(税込)。cameraモジュールも注文してしまったので、ちょっと高くなったけど。本体+ケース+電源等の基本製品だけなら9,000円台で揃うはず。というかセットで売ってるからソレを選んだほうがいいと思うけど。
ただ、ちょっと問題が。USB電源アダプタに、USB電源ケーブルがついてくるはずだけど。ケーブルが入ってない…。全部の箱を開けて確認してみたけど、やっぱり入ってない…。
USB電源ケーブルは別売りだったのかなと不安に思って、 _USB電源アダプター 5V/2.5A/1P のページを再確認してみたけど、「USB電源ケーブル付属」と書いてあるよな…。これはたぶん、梱包ミスだな…。
とりあえず、KSYさんにメールでその旨連絡を入れておいたけど、どうなることやら…。「あらまあゴメンナサイ」で済んでくれればいいけど…。
※ 2016/0716追記。KSYさんから別途USB電源ケーブルが届いた、とメモ。対応してくれてありがとう、なのです。
◎ microSDHCの速度を測ってみたり。 :
Raspberry Pi は microSDHC にOSを入れて動かすらしいのだけど、以前は相性問題が起きてたそうで。なので、「相性問題は起きないよ」と謳ってる、Team製の microSDHC (KSY016G0MC28P1) も一緒に注文してみたわけで。
せっかくだから一応速度を測ってみたり。ちなみにカードリーダは、 _BUFFALO BSCRMSDCWH 。USB2.0接続。
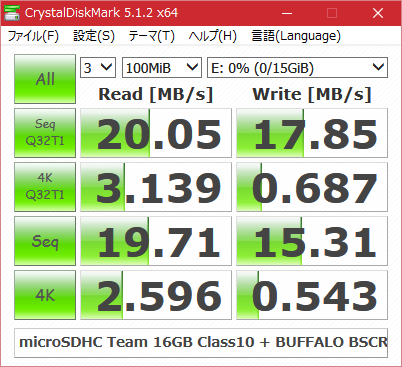
これは…。速いのか、遅いのか…。どうなんだろう…。どの数値を重視して判断すべきなのか…。
そもそも、このUSB接続カードリーダは、速度的にどうなんだらう。
せっかくだから一応速度を測ってみたり。ちなみにカードリーダは、 _BUFFALO BSCRMSDCWH 。USB2.0接続。
-----------------------------------------------------------------------
CrystalDiskMark 5.1.2 x64 (C) 2007-2016 hiyohiyo
Crystal Dew World : http://crystalmark.info/
-----------------------------------------------------------------------
* MB/s = 1,000,000 bytes/s [SATA/600 = 600,000,000 bytes/s]
* KB = 1000 bytes, KiB = 1024 bytes
Sequential Read (Q= 32,T= 1) : 20.054 MB/s
Sequential Write (Q= 32,T= 1) : 17.851 MB/s
Random Read 4KiB (Q= 32,T= 1) : 3.139 MB/s [ 766.4 IOPS]
Random Write 4KiB (Q= 32,T= 1) : 0.687 MB/s [ 167.7 IOPS]
Sequential Read (T= 1) : 19.715 MB/s
Sequential Write (T= 1) : 15.310 MB/s
Random Read 4KiB (Q= 1,T= 1) : 2.596 MB/s [ 633.8 IOPS]
Random Write 4KiB (Q= 1,T= 1) : 0.543 MB/s [ 132.6 IOPS]
Test : 100 MiB [E: 0.0% (0.0/14.7 GiB)] (x3) [Interval=5 sec]
Date : 2016/07/13 20:07:40
OS : Windows 10 Professional [10.0 Build 10586] (x64)
microSDHC Team 16GB Class10 + BUFFALO BSCRMSDCBK (USB2.0接続)
これは…。速いのか、遅いのか…。どうなんだろう…。どの数値を重視して判断すべきなのか…。
そもそも、このUSB接続カードリーダは、速度的にどうなんだらう。
◎ OSをインストールするための準備。 :
自分はメインPC上で Windows を使ってるので、
_Raspberry Pi Downloads - Software for the Raspberry Pi
から、NOOBS なるものを入手。NOOBS_v1_9_2.zip をDLした。
コレを解凍して、microSDHC に全ファイルをコピー。この microSDHC を使って Raspberry Pi を起動すると、OSをインストールすることができるらしい。
コレを解凍して、microSDHC に全ファイルをコピー。この microSDHC を使って Raspberry Pi を起動すると、OSをインストールすることができるらしい。
◎ ケースに入れた。 :
ケースを開けて、中に Raspberry Pi3 を入れる。が、ケースを開けるところで一苦労。4点で引っ掛かるようになってたけど…。どうにかなんとか開けたけど…。何かコツがあるのだろうか。
ちなみに、今回白いケースを選んだのは、Raspberry Pi2 以降は強い光を当てると誤動作する、という話を見かけたからで。
_Raspberry Pi 2 にフラッシュなどの強い光を当てると再起動してしまう件 | ピックワールド(PIC World)
対策としては、誤動作するチップに光を遮る何かを載せるとか、不透明なケースを選ぶとか…。本当は透明なケースにしたかったのだけど、そういう理由で白いケースを選んだわけで。
ちなみに、今回白いケースを選んだのは、Raspberry Pi2 以降は強い光を当てると誤動作する、という話を見かけたからで。
_Raspberry Pi 2 にフラッシュなどの強い光を当てると再起動してしまう件 | ピックワールド(PIC World)
対策としては、誤動作するチップに光を遮る何かを載せるとか、不透明なケースを選ぶとか…。本当は透明なケースにしたかったのだけど、そういう理由で白いケースを選んだわけで。
◎ microSDHCをスロットに差す。 :
microSDHC は、Raspberry Pi3 の裏面についてるカードスロットに差し込むらしい。以下の記事内の写真画像が参考になった。microSDHCの端子が、基板側にくるような方向で差すっぽい。
_Raspberry Pi 2 Model BにRaspbian(Jessie)をインストールする手順(2016年2月版) | darmus.net
_IoTスイッチの「Raspberry Piで作るドアの開閉お知らせ&履歴記録DIYキット」を使った設置方法IoT時代の初心者から始めるDIY電子工作
_Raspberry Pi 2 Model BにRaspbian(Jessie)をインストールする手順(2016年2月版) | darmus.net
_IoTスイッチの「Raspberry Piで作るドアの開閉お知らせ&履歴記録DIYキット」を使った設置方法IoT時代の初心者から始めるDIY電子工作
◎ OSをインストールしたいのだけど。 :
USB電源ケーブルが無いので、作業が進められない…。
と思ったけど、部屋の中を見渡したら、Androindタブレット端末 Lenovo IdeaPad Tablet A1 のUSB電源ケーブルが目に入った。コレを流用してどうにかならんか…。
IdeaPad Tablet A1のACアダプタをチェックしたら、5V / 1.5Aと書いてあった。Raspberry Pi3 は最大2.5A流れるらしいから、下手すると火事に…。いや、通常時は1Aぐらいと誰かが書いてたし、なんとかなってくれないか…。
と思ったけど、部屋の中を見渡したら、Androindタブレット端末 Lenovo IdeaPad Tablet A1 のUSB電源ケーブルが目に入った。コレを流用してどうにかならんか…。
IdeaPad Tablet A1のACアダプタをチェックしたら、5V / 1.5Aと書いてあった。Raspberry Pi3 は最大2.5A流れるらしいから、下手すると火事に…。いや、通常時は1Aぐらいと誰かが書いてたし、なんとかなってくれないか…。
◎ OSをインストール。 :
IdeaPad Tablet A1 のUSB電源ケーブルを試しに使ってみた。おお、虹色の画面が出てきた。これはもしかすると、なんとかなる、かもしれない。
後は画面に従って作業を進める。OSインストール終了後、一度再起動。
起動時に、イチゴっぽいアイコンが4つ表示された状態でずらずらとメッセージが。「俺様はCPUを4コア積んであるぜ!」ってことですかな…。素晴らしい。
デスクトップ画面が出てきた。これが Raspberry Pi のデスクトップ画面か…。
後は画面に従って作業を進める。OSインストール終了後、一度再起動。
起動時に、イチゴっぽいアイコンが4つ表示された状態でずらずらとメッセージが。「俺様はCPUを4コア積んであるぜ!」ってことですかな…。素晴らしい。
デスクトップ画面が出てきた。これが Raspberry Pi のデスクトップ画面か…。
◎ 構成その他。 :
ワットチェッカーで消費電力を測ってみたけど。インストール処理中は2W程度、電流は 0.05Aと表示されてた。もっとも、自分が使ってるワットチェッカー ―― たぶん、
_サンワサプライ TAP-TST5
だと思うけど、この製品の精度からして、数値はちょっとあてにならないかも。だとしても、先日200円PCケースに入れた CPU + M/B が、画面をペロンペロンと書き換えるほどに遅かったのに60W以上食ってたことを考えると…。コレは圧倒的な省電力性。画面もペロンペロンにならないし。
作業に使ったマウスとキーボードは、 _Logicool k400r 。ワイヤレスキーボードなので受信アダプタが電気を食いそうだけど、一応動いてくれた。まあ、タッチパッドもついてるキーボードだから、マウスとキーボードの2つを1つの受信アダプタで済ませられるわけで、その分消費電力がトントンで済んでくれれば、と思ってたりもするけど実際はどうなんだろう。
LAN接続は、ひとまず有線LANケーブルで。Raspberry Pi3 は無線LAN機能が追加された製品なので、できれば無線LANで接続したかったけど、MACアドレスが…分からん…。ウチの無線LANルータはMACアドレスを登録しないと接続できない設定なので、事前にMACアドレスを知る術がないと…。
そういえば、LANケーブルは100円ショップで買った品だけど、フツーに使えたなと…。ケーブルの線に「Category 5e」と書いてあったから、表記が正しくてコネクタの圧着がちゃんとできてれば、たぶん使えるだろうと思って買ったのだけど。
作業に使ったマウスとキーボードは、 _Logicool k400r 。ワイヤレスキーボードなので受信アダプタが電気を食いそうだけど、一応動いてくれた。まあ、タッチパッドもついてるキーボードだから、マウスとキーボードの2つを1つの受信アダプタで済ませられるわけで、その分消費電力がトントンで済んでくれれば、と思ってたりもするけど実際はどうなんだろう。
LAN接続は、ひとまず有線LANケーブルで。Raspberry Pi3 は無線LAN機能が追加された製品なので、できれば無線LANで接続したかったけど、MACアドレスが…分からん…。ウチの無線LANルータはMACアドレスを登録しないと接続できない設定なので、事前にMACアドレスを知る術がないと…。
そういえば、LANケーブルは100円ショップで買った品だけど、フツーに使えたなと…。ケーブルの線に「Category 5e」と書いてあったから、表記が正しくてコネクタの圧着がちゃんとできてれば、たぶん使えるだろうと思って買ったのだけど。
[ ツッコむ ]
#2 [raspberrypi] 秋月電子通商からも色々届いた
秋月電子通商で月曜の夜に注文していた品が今日届いた。
注文していた品は以下。
計 1,710円 + 送料 500円 = 2,210円。銀行振込で。
これが…マイクロサーボモータってヤツなのか…。初めて触った…。なんだか感動。
注文していた品は以下。
- ブレッドボード BB-801 ... \200
- ブレッドボード・ジャンパーコード(オス-オス)セット ... \220
- ブレッドボード・ジャンパーコード(オス-メス) 15cm(赤) (10本入) ... \220
- 細ピンヘッダ 1x20 ... \20
- マイクロサーボ SG92R ... \500
- モータードライバー TA7291P (2個入) ... \300
- 3mm赤色LED LT3U31P 250mcd 10個入 ... \100
- 圧電スピーカー(圧電サウンダ)(13mm) PKM13EPYH4000-A0 ... \30
- タクトスイッチ(黒色) ... \10
- タクトスイッチ(赤色) ... \10
- トグルスイッチ2回路2接点(ON-ONタイプ) ... \100
計 1,710円 + 送料 500円 = 2,210円。銀行振込で。
これが…マイクロサーボモータってヤツなのか…。初めて触った…。なんだか感動。
[ ツッコむ ]
2016/07/14(木) [n年前の日記]
#1 [raspberrypi] Raspberry Pi3にカメラモジュールを接続
Raspberry Pi の関連製品の中には、専用のカメラモジュールが用意されていて。以前は500万画素のセンサが載ってたらしいけど部品の調達ができなくなって、今現在はSONY製800万画素のセンサが載った、カメラモジュール V2 なるものが販売中だそうで。
今回、本体と一緒にカメラモジュールも購入したので、せっかくだから早速接続してみようかなと。
今回、本体と一緒にカメラモジュールも購入したので、せっかくだから早速接続してみようかなと。
◎ 本体と接続。 :
接続方法は、
_Raspberry Piカメラのセットアップ方法 >> DesignSpark
でも解説されているけど、文章だけで説明されているので、何が何だか…。
動画を探してみたら、なんとなく分かってきた。
_Raspberry Pi - Camera Tutorial... - YouTube
_Raspberry Pi [10] - Connecting Camera Module - YouTube
_Camera board setup - YouTube
本体基板上のコネクタの上に蓋だかタブだかがあるから、ソレを上にグッと引っ張ると隙間ができて。そこにカメラモジュールのフラットケーブルの先端を差し込むらしい。向きは、ケーブルの金属端子部分が、HDMIコネクタの側を向くように。差し込んだら、蓋だかタブだかを上から押しこむと、ケーブルが固定される、という感じらしい。
接続はできたのだけど、カメラモジュールがケースに入らない…。 _RS Componets Piケース RS for 3/2/B+ 白 なる、上面にイチゴっぽい穴が開いてるケースだけど…。「カメラモジュールを内蔵できますよ」てのが売りらしいけど、カメラモジュールのフラットケーブルがケース内でギッチリミッチリしていて…入らない…。コレは騙された、かも…。
なんとか無理矢理抑え込んで入れてみたけど、フラットケーブルの反発で、ケース上面の蓋がポコッと浮いてる状態に。うーん。それでもまあ、とりあえず、動作確認してみたり。
動画を探してみたら、なんとなく分かってきた。
_Raspberry Pi - Camera Tutorial... - YouTube
_Raspberry Pi [10] - Connecting Camera Module - YouTube
_Camera board setup - YouTube
本体基板上のコネクタの上に蓋だかタブだかがあるから、ソレを上にグッと引っ張ると隙間ができて。そこにカメラモジュールのフラットケーブルの先端を差し込むらしい。向きは、ケーブルの金属端子部分が、HDMIコネクタの側を向くように。差し込んだら、蓋だかタブだかを上から押しこむと、ケーブルが固定される、という感じらしい。
接続はできたのだけど、カメラモジュールがケースに入らない…。 _RS Componets Piケース RS for 3/2/B+ 白 なる、上面にイチゴっぽい穴が開いてるケースだけど…。「カメラモジュールを内蔵できますよ」てのが売りらしいけど、カメラモジュールのフラットケーブルがケース内でギッチリミッチリしていて…入らない…。コレは騙された、かも…。
なんとか無理矢理抑え込んで入れてみたけど、フラットケーブルの反発で、ケース上面の蓋がポコッと浮いてる状態に。うーん。それでもまあ、とりあえず、動作確認してみたり。
◎ OS側の設定。 :
sudo raspi-config を実行すると、camera がどうとかの項目があるので、そこで enable にしてやる。これだけでOS側の準備は終了らしい。
◎ 撮影用コマンド。 :
raspistill なるコマンドで静止画を撮影できるらしい。-o xxxxx.jpg で、保存ファイル名を指定。
プレビューを表示したくない場合は、-n オプションをつける。このオプションをつけても、5秒ほど様子を見てから実際に撮影するのは変わらないらしい。
5秒ほどプレビューしてる間に、明るさの調整その他をしているようで。-t 1 等を指定すればプレビュー時間を 1ms に指定できるらしいけど、その場合は風景の明るさが分からなくて真っ黒な画像が撮影されてしまったりする。
raspistill -o hoge.jpg5秒ほどデスクトップ画面全体にプレビューが表示されて、その後撮影されるようだけど。想像していたよりも、撮影時間が…長い…ような…。まさか1枚撮影するのに、体感で10秒近くかかるとは思ってなかった…。厳しいな、コレ…。
プレビューを表示したくない場合は、-n オプションをつける。このオプションをつけても、5秒ほど様子を見てから実際に撮影するのは変わらないらしい。
raspistill -n -o hoge.jpg
5秒ほどプレビューしてる間に、明るさの調整その他をしているようで。-t 1 等を指定すればプレビュー時間を 1ms に指定できるらしいけど、その場合は風景の明るさが分からなくて真っ黒な画像が撮影されてしまったりする。
raspistill -n -t 1 -o hoge.jpg
◎ 問題発生。 :
何度か撮影しているうちに、撮影画像の右下や左下に、白くてぼんやりとした、もやみたいな何かが映ってることに気が付いたり。必ず映るというわけでもないけど、たまに何故か写り込む…。
これは想像だけど。おそらく、ケースが白いこと、及び、カメラのレンズ位置とケースの穴の位置が合ってないことが問題なのではないか、と…。要するに、ケースのデザインが悪い予感。
ケース上面にカメラモジュールを付けると、こんな感じの見た目になるのだけど。
カメラのレンズ位置と、穴が、微妙にずれてるような…。
撮影すると一応撮影画像が得られるので、致命的なほどにずれてるわけではないのだけど。ただ、光の当たり方によってはこうなるのではないか、と。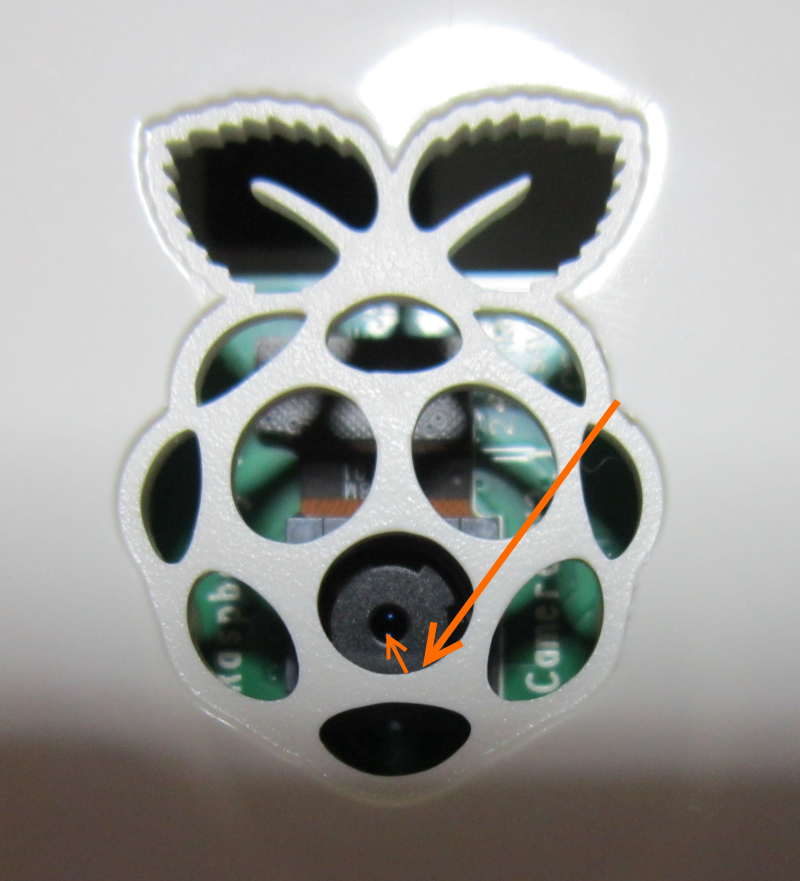
ケースが白い上に、カメラ位置がケースよりも結構奥に引っ込んでいるので、光が反射して入ってしまう時があるのではないか、と。
なら、黒いケースを買っておけば問題が無かったのか、とも思ったけど、黒いケースも表面がテカテカツヤツヤしているだろうから、やっぱり反射しそうな気…。であれば、透明なケースだったら…。それはそれで光が色々と屈折して入ってしまいそうな気も。
あるいは、こうしてしまうとか…。
いや、しかし、結構幅があるわけで…。切り取るのが大変そう。
「ちょっと待て。お前のソレ、そもそも取り付け位置がおかしい」という話もありそうな。例えば、 _Raspberry Pi 2 Model B用エンクロージャ--在庫限り - スイッチサイエンス によると、ケースに立てる形でつけることもできるらしいし。…ただ、件の記事にも書いてあるけど、カメラモジュールの基板は差し込めるものの、フラットケーブルの入る空間は考えられてないので、件のつけ方ではカメラが使えないはず。実際試してみたけど、やはりフラットケーブルの反発で、カメラモジュールが黒ひげ危機一髪状態で上にピョンと飛び出してしまったり。ちなみに上下を逆にして試してみたけどダメだった。無理に差したら基板の裏面が壊れそう。
てなわけで、カメラモジュールはケースの外に出さないとダメなんじゃないかな、と思えてきた。このケースを選んで…失敗した…。どうせ内部に入れられないなら、別ケースを買ったほうが良かったかも…。開けたり閉めたりするのも一苦労だし…。
いやまあ、これはこれで、テカテカツヤツヤしていて、なんだかオシャレな感じのケースではあるのだけど。見た目はチョベリグな感じなんですけど。
これは想像だけど。おそらく、ケースが白いこと、及び、カメラのレンズ位置とケースの穴の位置が合ってないことが問題なのではないか、と…。要するに、ケースのデザインが悪い予感。
ケース上面にカメラモジュールを付けると、こんな感じの見た目になるのだけど。
カメラのレンズ位置と、穴が、微妙にずれてるような…。
撮影すると一応撮影画像が得られるので、致命的なほどにずれてるわけではないのだけど。ただ、光の当たり方によってはこうなるのではないか、と。
ケースが白い上に、カメラ位置がケースよりも結構奥に引っ込んでいるので、光が反射して入ってしまう時があるのではないか、と。
なら、黒いケースを買っておけば問題が無かったのか、とも思ったけど、黒いケースも表面がテカテカツヤツヤしているだろうから、やっぱり反射しそうな気…。であれば、透明なケースだったら…。それはそれで光が色々と屈折して入ってしまいそうな気も。
あるいは、こうしてしまうとか…。
いや、しかし、結構幅があるわけで…。切り取るのが大変そう。
「ちょっと待て。お前のソレ、そもそも取り付け位置がおかしい」という話もありそうな。例えば、 _Raspberry Pi 2 Model B用エンクロージャ--在庫限り - スイッチサイエンス によると、ケースに立てる形でつけることもできるらしいし。…ただ、件の記事にも書いてあるけど、カメラモジュールの基板は差し込めるものの、フラットケーブルの入る空間は考えられてないので、件のつけ方ではカメラが使えないはず。実際試してみたけど、やはりフラットケーブルの反発で、カメラモジュールが黒ひげ危機一髪状態で上にピョンと飛び出してしまったり。ちなみに上下を逆にして試してみたけどダメだった。無理に差したら基板の裏面が壊れそう。
てなわけで、カメラモジュールはケースの外に出さないとダメなんじゃないかな、と思えてきた。このケースを選んで…失敗した…。どうせ内部に入れられないなら、別ケースを買ったほうが良かったかも…。開けたり閉めたりするのも一苦労だし…。
いやまあ、これはこれで、テカテカツヤツヤしていて、なんだかオシャレな感じのケースではあるのだけど。見た目はチョベリグな感じなんですけど。
◎ 撮影画像の画質。 :
撮影画像の画質は…。部屋の中を撮影した感じでは、なんというか…。Webカメラのレベル、とでもいうか…。
外の風景も撮影してみたいけど、電源コードの長さが届く範囲でしか撮影できないわけで…。
外の風景も撮影してみたいけど、電源コードの長さが届く範囲でしか撮影できないわけで…。
[ ツッコむ ]
#2 [anime] 「けいおん!」の二期が始まったっぽい
NHK-BSで放送されてる「けいおん!」が、二期目に入ったようで。1話を見たけど…。やっぱり今見ても、凄い…。動きも、表情も、やっぱり凄い…。どうしてここでそんな動きをさせようと考えるかな、てな感じで、凄い…。
1話の脚本は吉田玲子氏。吉田脚本と言えば「銀河機攻隊 マジェスティックプリンス」(以下「MJ」と略)ですよ。「MJ」も「けいおん!」も、 *1 キャラの会話のノリはそこそこ同じように感じているのだけど。しかし「けいおん!」はキャラの細かい仕草に対する気配りの度合いが違う…。これはおそらく1話のコンテを担当した、監督の山田尚子氏のソレなのかなと。あるいは当時の京アニの作画陣の拘り、だったのだろうかと。脚本から大きく逸脱するわけでもなく、しかしおそらく細部に対して大幅に膨らませながらコンテや動きを描いてたのではあるまいか、と…。だって、「MJ」あたりでは、こういうアレコレなんてまず無いし。どちらも優れた脚本家さんから脚本を受け取っておいて、「MJ」スタッフは「MJ」のレベルで出してきて、京アニは「けいおん!」を出してきたわけで。 *2
何にせよ、「けいおん!」の二期の一話を見て、やっぱり凄いなと思いました。とメモ。
1話の脚本は吉田玲子氏。吉田脚本と言えば「銀河機攻隊 マジェスティックプリンス」(以下「MJ」と略)ですよ。「MJ」も「けいおん!」も、 *1 キャラの会話のノリはそこそこ同じように感じているのだけど。しかし「けいおん!」はキャラの細かい仕草に対する気配りの度合いが違う…。これはおそらく1話のコンテを担当した、監督の山田尚子氏のソレなのかなと。あるいは当時の京アニの作画陣の拘り、だったのだろうかと。脚本から大きく逸脱するわけでもなく、しかしおそらく細部に対して大幅に膨らませながらコンテや動きを描いてたのではあるまいか、と…。だって、「MJ」あたりでは、こういうアレコレなんてまず無いし。どちらも優れた脚本家さんから脚本を受け取っておいて、「MJ」スタッフは「MJ」のレベルで出してきて、京アニは「けいおん!」を出してきたわけで。 *2
何にせよ、「けいおん!」の二期の一話を見て、やっぱり凄いなと思いました。とメモ。
[ ツッコむ ]
2016/07/15(金) [n年前の日記]
#1 [raspberrypi] Raspberry Pi のカメラモジュールV2はピントが合ってない
撮影実験をしているうちに気が付いたけど。Raspberry Pi のカメラモジュールV2は、ピントというかフォーカスが合ってない、ような…。低価格帯のWebカメラと同様というか…。チャット等をする際は都合がいいようにと、80cmとか1mとか、そのぐらいの近い距離にピントが固定してある、ような気がする。
ググってみたら、やっぱりそうだったらしい。
_Raspberry Pi - View topic - New 8MP Camera - Q&A thread
英語赤点野郎だから自信は無いけど、
「V2は、V1と違って、無限遠にピントを合わせた状態で出荷していない」
「これはセンサ供給元のSONYが意図的にやっている」
「携帯電話に載せること前提の製品だからそうなってる」
「接着剤ではなく粘性の何かで固定すればユーザが調整可能になりそうだけど…どうしよ」
みたいな感じの話が書かれてる、のかな。たぶん。
ユーザさんが頑張ってどうにか調整した際の結果画像も提示されていたけど。
_Raspberry Pi Camera v2 - Album on Imgur
たしかに全然違う…。
ただ、「ペンチで回そうとするとレンズを挟み過ぎて壊しちゃうよ。俺、2回壊した」てな話も。それは…困ったのう。
件の記事では、レンズ部分を回すための専用の工具と言うか、レンズスパナとやらを自作して調整したほうがいいぜ、みたいな話になってるようで。古くなったクレジットカードを切り抜いて作ったとかなんとか。また、レンズスパナの3Dプリンタ用データもあるらしい。3Dプリンタか…。いいな…。そういう話を聞いてしまうと、やっぱり3Dプリンタは革命だな、と…。
どこかで発売しないか…。レンズスパナ…。いや、使う場所があまりにも限られてるから、作るわけないか…。
クレジットカードって、厚さはどのくらいなんだろう…。 _クレジットカードのサイズは?国際規格とは?|クレジットカードの仕組みや使い方の道しるべ! によると、厚さ 0.76mm らしい。ということは、1mmぐらいのプラ板があればレンズスパナとやらが作れるのかな。
ググってみたら、やっぱりそうだったらしい。
_Raspberry Pi - View topic - New 8MP Camera - Q&A thread
英語赤点野郎だから自信は無いけど、
「V2は、V1と違って、無限遠にピントを合わせた状態で出荷していない」
「これはセンサ供給元のSONYが意図的にやっている」
「携帯電話に載せること前提の製品だからそうなってる」
「接着剤ではなく粘性の何かで固定すればユーザが調整可能になりそうだけど…どうしよ」
みたいな感じの話が書かれてる、のかな。たぶん。
ユーザさんが頑張ってどうにか調整した際の結果画像も提示されていたけど。
_Raspberry Pi Camera v2 - Album on Imgur
たしかに全然違う…。
ただ、「ペンチで回そうとするとレンズを挟み過ぎて壊しちゃうよ。俺、2回壊した」てな話も。それは…困ったのう。
件の記事では、レンズ部分を回すための専用の工具と言うか、レンズスパナとやらを自作して調整したほうがいいぜ、みたいな話になってるようで。古くなったクレジットカードを切り抜いて作ったとかなんとか。また、レンズスパナの3Dプリンタ用データもあるらしい。3Dプリンタか…。いいな…。そういう話を聞いてしまうと、やっぱり3Dプリンタは革命だな、と…。
どこかで発売しないか…。レンズスパナ…。いや、使う場所があまりにも限られてるから、作るわけないか…。
クレジットカードって、厚さはどのくらいなんだろう…。 _クレジットカードのサイズは?国際規格とは?|クレジットカードの仕組みや使い方の道しるべ! によると、厚さ 0.76mm らしい。ということは、1mmぐらいのプラ板があればレンズスパナとやらが作れるのかな。
[ ツッコむ ]
#2 [raspberrypi] 紙でカメラモジュールケースを仮作成
_Raspberry Pi3 のケース
内からカメラモジュールを外に出すことに決めたものの。カメラモジュールの基板が露出した状態で実験するのは危ないよなと。公式でも「静電気にめちゃくちゃ弱いから取り扱いには気をつけろ」と書いてあったし…。
後で、もっとちゃんとしたカメラモジュール用ケースを作ることになるだろうけど、ひとまず、紙を使って仮ケースを作成してみたり。こんな感じに。

紙製だから強度が無くて、フラットケーブルの反発で歪んでるけど…。まあ、仮だからいいやと。
ケースへの固定その他は、100円ショップで購入したメンディングテープ(?)で。貼ったり剥がしたりできるテープ。仮だからコレでいいや、と。
モジュールの固定は、コレも100円ショップで買った、ビニール被膜付きの針金で。仮だからコレでいいや、と。
後で、もっとちゃんとしたカメラモジュール用ケースを作ることになるだろうけど、ひとまず、紙を使って仮ケースを作成してみたり。こんな感じに。
紙製だから強度が無くて、フラットケーブルの反発で歪んでるけど…。まあ、仮だからいいやと。
ケースへの固定その他は、100円ショップで購入したメンディングテープ(?)で。貼ったり剥がしたりできるテープ。仮だからコレでいいや、と。
モジュールの固定は、コレも100円ショップで買った、ビニール被膜付きの針金で。仮だからコレでいいや、と。
◎ 図面その他。 :
カメラモジュールのサイズは、
_Raspberry Pi Camera Module Mechanical Dimensions という記事が参考になった。ただ、試した感じでは、カメラ部分は 8x8mmピッタリというわけではないようで。9x9mmぐらいにしておいたほうがスポンと入ってくれそう。
_AR_CAD で以下のような図面を作成。
_camera_module_case_2.pdf
コレをプリンタで印刷して組み立てた。
印刷用紙は、少し厚みがあって工作向きとされている、 _Canon マットフォトペーパー A4 を使ってみたり。
さておき。紙を使ってもこの程度の形状が作れるなら…。100円ショップで薄いPPシートを買ってきて作れなくもない、のかな。どうなんだろう。その場合静電気はどうなるんだという不安もあるけど。
_Raspberry Pi Camera Module Mechanical Dimensions という記事が参考になった。ただ、試した感じでは、カメラ部分は 8x8mmピッタリというわけではないようで。9x9mmぐらいにしておいたほうがスポンと入ってくれそう。
_AR_CAD で以下のような図面を作成。
_camera_module_case_2.pdf
コレをプリンタで印刷して組み立てた。
印刷用紙は、少し厚みがあって工作向きとされている、 _Canon マットフォトペーパー A4 を使ってみたり。
さておき。紙を使ってもこの程度の形状が作れるなら…。100円ショップで薄いPPシートを買ってきて作れなくもない、のかな。どうなんだろう。その場合静電気はどうなるんだという不安もあるけど。
[ ツッコむ ]
#3 [pc] Canon PIXUS iP4600ってどの程度の厚紙まで利用できるのだろう
プリンタで、もう少し厚みのある紙が使えたらいいのだけど…と思ったのだけど。自分が使ってるプリンタ、Canon PIXUS iP4600 について改めて調べてみたら、本来なら Canon マットフォトペーパーA4すら使えないのでは、と思えてきて。
_使用できる用紙と積載可能枚数(PIXUS iP4600) には、
ところが、 _Canon マットフォトペーパー A4 は、170g/m2 なわけで。オーバーしてるやん…。
しかし、 _プリントヘッド位置を調整する(PIXUS iP4600) では、
「プリントヘッド位置調整には MP-101 を使いましょう」と書いてあるのに、スペック上は「そんな重さの紙は使えませんよ」と書いてあるわけで。どういうことや…。
あ。分かった。「64〜105g/m2(キヤノン純正紙以外の普通紙)」と書いてあるところがポイントなのか。「Canon純正紙は別扱いだよ」「他のメーカが出してる重い紙を使って『紙が詰まった!』と文句言われても、そんなの知らんがな」ってことなのか。
ていうか。使える用紙の中に、Canon マットフォトペーパー MP-101 が、ちゃんと列挙されてましたわ…。
改めて眺めてみたら、 _Canon 写真用紙・光沢 プロ プラチナグレード のほうが、紙が厚いのでは…。300g/m2, 紙厚 0.300mm と書いてあるし。マットフォトペーパーは、170g/m2, 0.220mm だし。
だけど、値段が凄い。マットフォトペーパーは、1枚28円ぐらいだけど。写真用紙プラチナグレードは、1枚66円ぐらい。
他のメーカで出してる用紙はどうなのかなとググってみたけど。例えば _ELECOM ペーパークラフト専用紙(マットタイプ) - EJK-HCシリーズ は、厚くても 180g/m2, 0.21mm で、Canon マットフォトペーパーと同じくらい。やはりそのぐらいの紙厚が無難、ということだろうか。
_使用できる用紙と積載可能枚数(PIXUS iP4600) には、
64〜105g/m2(キヤノン純正紙以外の普通紙)この範囲外の重さの用紙(キヤノン純正紙以外)は、紙づまりの原因となりますので使用しないでください。と書いてある。 *1
ところが、 _Canon マットフォトペーパー A4 は、170g/m2 なわけで。オーバーしてるやん…。
しかし、 _プリントヘッド位置を調整する(PIXUS iP4600) では、
罫線がずれるなど、印刷結果に均一感が見られないときには、プリントヘッド位置を調整します。と書いてある。
用意するもの:A4サイズのマットフォトペーパー(MP-101)1枚
「プリントヘッド位置調整には MP-101 を使いましょう」と書いてあるのに、スペック上は「そんな重さの紙は使えませんよ」と書いてあるわけで。どういうことや…。
あ。分かった。「64〜105g/m2(キヤノン純正紙以外の普通紙)」と書いてあるところがポイントなのか。「Canon純正紙は別扱いだよ」「他のメーカが出してる重い紙を使って『紙が詰まった!』と文句言われても、そんなの知らんがな」ってことなのか。
ていうか。使える用紙の中に、Canon マットフォトペーパー MP-101 が、ちゃんと列挙されてましたわ…。
改めて眺めてみたら、 _Canon 写真用紙・光沢 プロ プラチナグレード のほうが、紙が厚いのでは…。300g/m2, 紙厚 0.300mm と書いてあるし。マットフォトペーパーは、170g/m2, 0.220mm だし。
だけど、値段が凄い。マットフォトペーパーは、1枚28円ぐらいだけど。写真用紙プラチナグレードは、1枚66円ぐらい。
他のメーカで出してる用紙はどうなのかなとググってみたけど。例えば _ELECOM ペーパークラフト専用紙(マットタイプ) - EJK-HCシリーズ は、厚くても 180g/m2, 0.21mm で、Canon マットフォトペーパーと同じくらい。やはりそのぐらいの紙厚が無難、ということだろうか。
*1: m2 は、平方メートル。環境依存文字になってしまうのでとりあえず「m2」と記述。
[ ツッコむ ]
2016/07/16(土) [n年前の日記]
#1 [raspberrypi] カメラモジュールのケースをどうにかすべくアレコレ購入
Raspberry Pi3 のカメラモジュールV2を、そこそこちゃんとしたケースに入れてやりたいので、ケースになりそうな何かを探しに、あちらこちらのお店まで電動自転車で行ってきたり。
ホーマックで、M2 x 10 なるネジ+ナットと、OLFA 万能M厚型カッターを購入。
カメラモジュールの基板を何かしらに固定するために、ネジとナットが必要になるだろうと。カメラモジュール基板に開いている穴は直径が2mmらしいので、ココは直径2mmのネジが欲しい。店頭で、M2は太さ、と書いてあったから買ってみたけど、本当にその太さかな…。ノギスで測ってみたら、一応2mmの太さのように見えてるけど…。
_OLFA 万能M厚型カッター は、フツーのカッターより刃が太くて、0.45mm ほどあるらしい。その分、プラ板等も切りやすい、という感想記事を見かけたので購入してみたり。替刃は、 _オルファ 替刃M厚 なるものが必要。
Seriaでメモ帳やらなんやらを購入。色々探してみたけど、カメラモジュールのケースになりそうなものは見つからず。DS(ニンテンドーDS?)のメモリカードケースが、もしかすると使えそうな気もしたけど…。
ダイソーで、0.75mm厚のPPシートその他を購入。ここでもケース代わりになりそうなものは見つからなかったので、PPシートを切ったり折ったりして工作するしかないかなと。しかし、0.2、0.75、1、1.2、1.4mm厚ぐらいしか見つからない。0.5mm厚とか無いのかな…。もしかして、誰かがごっそり買い占めて、その後入ってこない、みたいな状態だったのだろうか。
リオンドールでフリスクなるものを購入。このケースがカメラモジュール用のケースにピッタリ、という話を見かけたので…。場合によってはその選択肢もアリかなと。ただ、50粒も入ってる…。もったいないから一応食べるけど、いつになったら空になることやら。
ホーマックで、M2 x 10 なるネジ+ナットと、OLFA 万能M厚型カッターを購入。
カメラモジュールの基板を何かしらに固定するために、ネジとナットが必要になるだろうと。カメラモジュール基板に開いている穴は直径が2mmらしいので、ココは直径2mmのネジが欲しい。店頭で、M2は太さ、と書いてあったから買ってみたけど、本当にその太さかな…。ノギスで測ってみたら、一応2mmの太さのように見えてるけど…。
_OLFA 万能M厚型カッター は、フツーのカッターより刃が太くて、0.45mm ほどあるらしい。その分、プラ板等も切りやすい、という感想記事を見かけたので購入してみたり。替刃は、 _オルファ 替刃M厚 なるものが必要。
Seriaでメモ帳やらなんやらを購入。色々探してみたけど、カメラモジュールのケースになりそうなものは見つからず。DS(ニンテンドーDS?)のメモリカードケースが、もしかすると使えそうな気もしたけど…。
ダイソーで、0.75mm厚のPPシートその他を購入。ここでもケース代わりになりそうなものは見つからなかったので、PPシートを切ったり折ったりして工作するしかないかなと。しかし、0.2、0.75、1、1.2、1.4mm厚ぐらいしか見つからない。0.5mm厚とか無いのかな…。もしかして、誰かがごっそり買い占めて、その後入ってこない、みたいな状態だったのだろうか。
リオンドールでフリスクなるものを購入。このケースがカメラモジュール用のケースにピッタリ、という話を見かけたので…。場合によってはその選択肢もアリかなと。ただ、50粒も入ってる…。もったいないから一応食べるけど、いつになったら空になることやら。
◎ 帰宅後、犬の散歩。 :
帰宅後、疲れてそのまま寝てしまいそうな感じだったので、ちょっと早いけど夕方の犬の散歩に。翠ヶ丘公園のあたりで蚊に刺されて、手の甲がぷっくりと…。虫よけジェルは塗っていったのだけどな…。
そういえば、最近薬局に行ってもジェルタイプの虫よけ商品が無くて、どれもスプレータイプばかりなのだけど。何故なんだろう。ジェルタイプは何か問題でも発生したのだろうか。
そういえば、最近薬局に行ってもジェルタイプの虫よけ商品が無くて、どれもスプレータイプばかりなのだけど。何故なんだろう。ジェルタイプは何か問題でも発生したのだろうか。
[ ツッコむ ]
#2 [raspberrypi] USB電源ケーブルが届いた
KSYから、梱包されてなかったUSB電源ケーブルが別途郵送で届いた。早速使ってみたけれど、フツーに Raspberry Pi3 が起動してくれた。これで、最大2.5Aが流れても、問題無く実験ができそう…。
[ ツッコむ ]
2016/07/17(日) [n年前の日記]
#1 [raspberrypi] Raspberry Pi3でLチカ
「Lチカ」とは、「LEDをチカチカと光らせる」の略、でしょうか。分かりませんが。
先日、秋月電子通商さんから、赤いLEDやら、ブレッドボートやら、色々購入したので、Raspberry Pi3 で光らせてみようかと。
「はぁ? LEDが光ったとして、ソレが何なの?」
「LEDなんか周りで光りまくりじゃん」
「そんなもんを今更わざわざ光らせるとか、意味わかんない。バカなの?」
…などと言われるかもしれんけど。LEDという電子部品をコンピュータから制御できるってことは、その延長線上で、モータを制御したり等、色んなモノを制御できる道筋が見えてくるわけで。プログラミングで言うところの「Hello World」ですよ。「Hello World」が表示できれば最低限の環境構築は完了で、後はひたすらソースを書くだけ、てな状態になるわけで。Lチカも似たようなもんです。
先日、秋月電子通商さんから、赤いLEDやら、ブレッドボートやら、色々購入したので、Raspberry Pi3 で光らせてみようかと。
「はぁ? LEDが光ったとして、ソレが何なの?」
「LEDなんか周りで光りまくりじゃん」
「そんなもんを今更わざわざ光らせるとか、意味わかんない。バカなの?」
…などと言われるかもしれんけど。LEDという電子部品をコンピュータから制御できるってことは、その延長線上で、モータを制御したり等、色んなモノを制御できる道筋が見えてくるわけで。プログラミングで言うところの「Hello World」ですよ。「Hello World」が表示できれば最低限の環境構築は完了で、後はひたすらソースを書くだけ、てな状態になるわけで。Lチカも似たようなもんです。
◎ LEDと抵抗値。 :
今回購入したLEDは、
_3mm赤色LED LT3U31P 250mcd
。秋月電子さんのサイトには、
_LT3U31Pのデータシート(pdf)
も載っている。それによると、順電圧 1.85V、電流 20mA を流すと、250mcd の明るさで光るよ、と書いてあるように見える。自信無いけど。
LEDを光らせるためには、えてして直列に抵抗を繋いで、電圧や電流を調整しないといけない。抵抗値の求め方は、これも秋月電子さんのサイトで、親切にも計算の仕方が載っている。
_抵抗の計算方法(led-r-calc.pdf)
例えば、電源電圧が3.3Vと仮定すると、繋げる抵抗値は…。
待て。あわてるな。これは孔明の罠だ。
単に光らせるだけなら、その抵抗値でいいのだろうけど。今回は Raspberry Pi の GPIO を使って光らせたいわけで。しかし、Raspberry Pi の GPIO には、流せる電流の制限があるから…。
_ツール・ラボ >> 第22回 Raspberry PiのGPIO概要
_Raspberry Pi LED点滅(Lチカ) 抵抗の決め方 : 電子工作と3DCAD
ということで、「データシートに書いてあるから」と、20mA を流したらマズイ。GPIOに合わせて、ココは 3mA程度を流すことにする。
「ちょっと待てよブラザー。データシート上では20mA流すことになってるのに、3mA程度を流しても光ってくれるのかい?」
ソレは…ぶっちゃけ試してみないと分からない。LEDの各製品によってスペックが違うので。その程度でも電流の大きさに応じて光ってくれるヤツも居れば、最小でもンmAは流してくれないと俺は光らないぜ、ってヤツも居るので。
LEDを光らせるためには、えてして直列に抵抗を繋いで、電圧や電流を調整しないといけない。抵抗値の求め方は、これも秋月電子さんのサイトで、親切にも計算の仕方が載っている。
_抵抗の計算方法(led-r-calc.pdf)
LED抵抗の基本的な計算式は次のようになります。あるいは、 _ツール・ラボ >> 第20回 LEDに接続する抵抗値を計算する も参考になるかと。
(電源電圧[V] - 順方向電圧降下[V]) ÷ 順方向電流[A] = 抵抗値[Ω]
例えば、電源電圧が3.3Vと仮定すると、繋げる抵抗値は…。
(3.3V - 1.85V) / 0.02A = 72.5Ωつまり、72.5Ωの抵抗を繋いでやれば、このLEDは定格で光ってくれるはず。ということで、72.5Ωぐらいの抵抗を探して…。
待て。あわてるな。これは孔明の罠だ。
単に光らせるだけなら、その抵抗値でいいのだろうけど。今回は Raspberry Pi の GPIO を使って光らせたいわけで。しかし、Raspberry Pi の GPIO には、流せる電流の制限があるから…。
_ツール・ラボ >> 第22回 Raspberry PiのGPIO概要
- GPIOピン1本あたりの最大電流は16mA
- 複数本のGPIOピンを使用する場合、同時に流せる電流の合計は50mAまで
_Raspberry Pi LED点滅(Lチカ) 抵抗の決め方 : 電子工作と3DCAD
Raspberry Piクックブックによれば、出力ピン1本あたり3mAを超える電流を流すと、寿命を縮めるおそれがあるそうです。
なので、電流制限抵抗も3mAとなるように抵抗値を選ぶほうが良いと思われる。
ということで、「データシートに書いてあるから」と、20mA を流したらマズイ。GPIOに合わせて、ココは 3mA程度を流すことにする。
(3.3V - 1.85V) / 0.003A = 約483Ω483Ωより大きい抵抗を繋げてやればいい、ということになる。
「ちょっと待てよブラザー。データシート上では20mA流すことになってるのに、3mA程度を流しても光ってくれるのかい?」
ソレは…ぶっちゃけ試してみないと分からない。LEDの各製品によってスペックが違うので。その程度でも電流の大きさに応じて光ってくれるヤツも居れば、最小でもンmAは流してくれないと俺は光らないぜ、ってヤツも居るので。
◎ 抵抗値の見方。 :
ひとまず、工具箱の中を漁ってヨサゲな抵抗を探したり。「青灰茶金」の抵抗が見つかった。…ところで、最近自分も老眼が進んだようで、眼鏡を外さないと近い距離が見えないんですよね。探すのに10分ぐらいかかった。それはともかく。
抵抗器は、一般的には表面に4本の線が塗られていて、その線の色で抵抗値が分かるようになってる。 _抵抗のカラーコード や、 _抵抗器のカラーコード を眺めれば分かるだろうか…。左から順番に、2桁の数字、10のn乗、誤差、を表してる。
色と数値の対応は以下の通り。
なので、「青灰茶金」の抵抗は、68(青灰) × 10の1乗(茶) = 680Ω、誤差は±5%(金)、の抵抗値のはず。なんだけど。ホントに合ってるのかな。自信が無い。抵抗値を読んだのなんて、下手すると高校以来だし…。不安になったのでテスターを持ち出してきて測ってみたら 650Ωぐらいの表示になったので、まあ、おおよそ合ってるのではないかと…。
計算で求めた483Ωより大きいけど、抵抗が大きければ流れる電流は少なくなるので、GPIOが壊れにくくなるはず。なので、これでいいやと。
抵抗器は、一般的には表面に4本の線が塗られていて、その線の色で抵抗値が分かるようになってる。 _抵抗のカラーコード や、 _抵抗器のカラーコード を眺めれば分かるだろうか…。左から順番に、2桁の数字、10のn乗、誤差、を表してる。
色と数値の対応は以下の通り。
黒 茶 赤 橙 黄 緑 青 紫 灰 白 0 1 2 3 4 5 6 7 8 9
金 : 10の-1乗 = 0.1、あるいは、誤差±5% 銀 : 10の-2乗 = 0.01、あるいは、誤差±10%
なので、「青灰茶金」の抵抗は、68(青灰) × 10の1乗(茶) = 680Ω、誤差は±5%(金)、の抵抗値のはず。なんだけど。ホントに合ってるのかな。自信が無い。抵抗値を読んだのなんて、下手すると高校以来だし…。不安になったのでテスターを持ち出してきて測ってみたら 650Ωぐらいの表示になったので、まあ、おおよそ合ってるのではないかと…。
計算で求めた483Ωより大きいけど、抵抗が大きければ流れる電流は少なくなるので、GPIOが壊れにくくなるはず。なので、これでいいやと。
◎ 回路図。 :
_Fritzing
というツールを使うと回路図っぽいものがサクサク作れるらしいので試しに導入。起動してから…。
こんな感じになった。
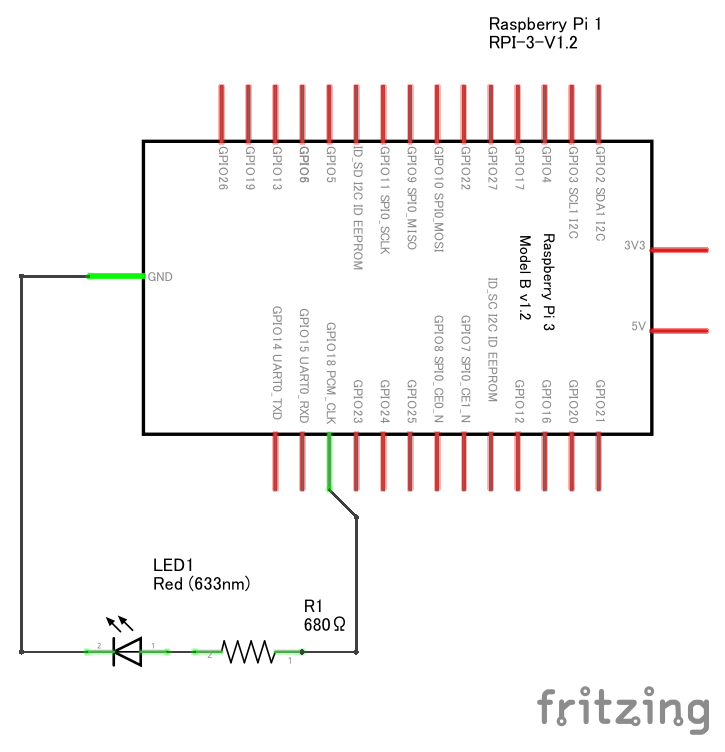
Fritzingの使い方が今一つ分かってないので謎の色がついてるけど、どういう繋ぎ方をしているのかは分かるだろうから、まあいいか…。
とりあえず、GPIO 18番とGNDに繋いでみたり。
- 上のほうの「ブレッドボード」を選ぶ。
- 画面に表示されてるブレッドボードを選択。右下のインスペクター欄で「full+」→「half+」に変更。
- 右上のパーツ欄で検索。「raspberry」で検索すると「RP3」もリストアップされるので画面にD&D。
- 右上のパーツ欄で「CORE」を選べば、抵抗やLEDが選べる。画面にD&D。
- 端子の上でマウスボタンを押してドラッグすると配線ができる。
こんな感じになった。
Fritzingの使い方が今一つ分かってないので謎の色がついてるけど、どういう繋ぎ方をしているのかは分かるだろうから、まあいいか…。
とりあえず、GPIO 18番とGNDに繋いでみたり。
◎ Pythonモジュールをインストール。 :
今回は Python でスクリプトを書いてLチカさせたい。なので、Raspberry Pi3 上で、PythonからGPIOにアクセスできるようにするためのモジュールをインストール。
sudo aptitude install python-rpi.gpioむ。既にインストール済みだった。最近の Raspberry Pi のOSは、至れり尽くせりってことでしょうか…。
◎ Pythonスクリプトを書く。 :
あちこちのサイトを眺めながらコピペ。led_flashing.py というファイル名で保存。
実行してみる。
光ったね! 親父にも光ったことないのに! などと1stガンダムのアムロになったつもりで意味不明な台詞を叫びたくなるぐらいにちょっとだけテンション上がってきました。
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
from time import sleep
GPIO.setmode(GPIO.BCM)
GPIO.setup(18, GPIO.OUT)
for i in [1, 1, 1, 2, 2, 2, 4, 8, 16, 32]:
t = 0.01 * i
for j in range(4):
GPIO.output(18, GPIO.HIGH)
sleep(t)
GPIO.output(18, GPIO.LOW)
sleep(t)
GPIO.cleanup()
実行してみる。
sudo python led_flashing.py
光ったね! 親父にも光ったことないのに! などと1stガンダムのアムロになったつもりで意味不明な台詞を叫びたくなるぐらいにちょっとだけテンション上がってきました。
[ ツッコむ ]
#2 [raspberrypi][nitijyou] 配線用のアレコレを買いに自転車で
犬の散歩をした後、近所のホームセンターまで、Raspberry Piの実験用のパーツを買いに。
使おうとしてる抵抗器が、何かの基板から半田を溶かして取り出したソレなので、端子が短過ぎて延長しないとダメだなと。しかし、延長できる導線(?)を持ってなくて。以前100円ショップで買った針金で作業してみたけど、固過ぎるのかなかなか曲がってくれず。ちゃんとした線を買ってこないとダメかも、と。
ダイユーエイトに寄ったけど、電子工作用に使えそうな何かしらは売ってなかった。100V交流の工事用のアレコレは売ってるんだけど…。
ただ、保冷材(500g)や、PPシートを接着できる薄いタイプの両面テープ、 _3M KPU-12 (Scotch 超強力 PREMIER GOLD、幅12mm、厚さ0.6mm、長さ1.5m) を見つけたので、そのあたりを購入。このお店では夏しか保冷材を売ってないので、見つけたらその時にゲットしておかないと。
ホーマックで、スズメッキ線なるものを発見。太さが0.4mmと0.6mmがあったけど、どちらがブレッドボード向きなのか分からないので両方購入。型番は、 _ELPA HK-SM04H 、 _ELPA HK-SM06H だった。
抵抗器にメッキ線をグルグル巻く作業が絶対面倒なことになりそうなので、 _藤丸産業 先丸カッティングプライヤー HK-140 なる工具も購入。「ビーズ細工のワイヤー曲げ加工等に」とパッケージに書いてあった。
単三電池 x 2 の電池ボックスを持ってないので、ソレも購入。 _ELPA UM-SC32NH 。スイッチとカバー付き。ついでに、単三電池 x 1の電池ボックスも購入。 _ELPA UM-310NH 。
使おうとしてる抵抗器が、何かの基板から半田を溶かして取り出したソレなので、端子が短過ぎて延長しないとダメだなと。しかし、延長できる導線(?)を持ってなくて。以前100円ショップで買った針金で作業してみたけど、固過ぎるのかなかなか曲がってくれず。ちゃんとした線を買ってこないとダメかも、と。
ダイユーエイトに寄ったけど、電子工作用に使えそうな何かしらは売ってなかった。100V交流の工事用のアレコレは売ってるんだけど…。
ただ、保冷材(500g)や、PPシートを接着できる薄いタイプの両面テープ、 _3M KPU-12 (Scotch 超強力 PREMIER GOLD、幅12mm、厚さ0.6mm、長さ1.5m) を見つけたので、そのあたりを購入。このお店では夏しか保冷材を売ってないので、見つけたらその時にゲットしておかないと。
ホーマックで、スズメッキ線なるものを発見。太さが0.4mmと0.6mmがあったけど、どちらがブレッドボード向きなのか分からないので両方購入。型番は、 _ELPA HK-SM04H 、 _ELPA HK-SM06H だった。
抵抗器にメッキ線をグルグル巻く作業が絶対面倒なことになりそうなので、 _藤丸産業 先丸カッティングプライヤー HK-140 なる工具も購入。「ビーズ細工のワイヤー曲げ加工等に」とパッケージに書いてあった。
単三電池 x 2 の電池ボックスを持ってないので、ソレも購入。 _ELPA UM-SC32NH 。スイッチとカバー付き。ついでに、単三電池 x 1の電池ボックスも購入。 _ELPA UM-310NH 。
[ ツッコむ ]
2016/07/18(月) [n年前の日記]
#1 [raspberrypi] Raspberry Pi3でスイッチを読み取り
Lチカはできたから、今度はスイッチの読み取りを実験。
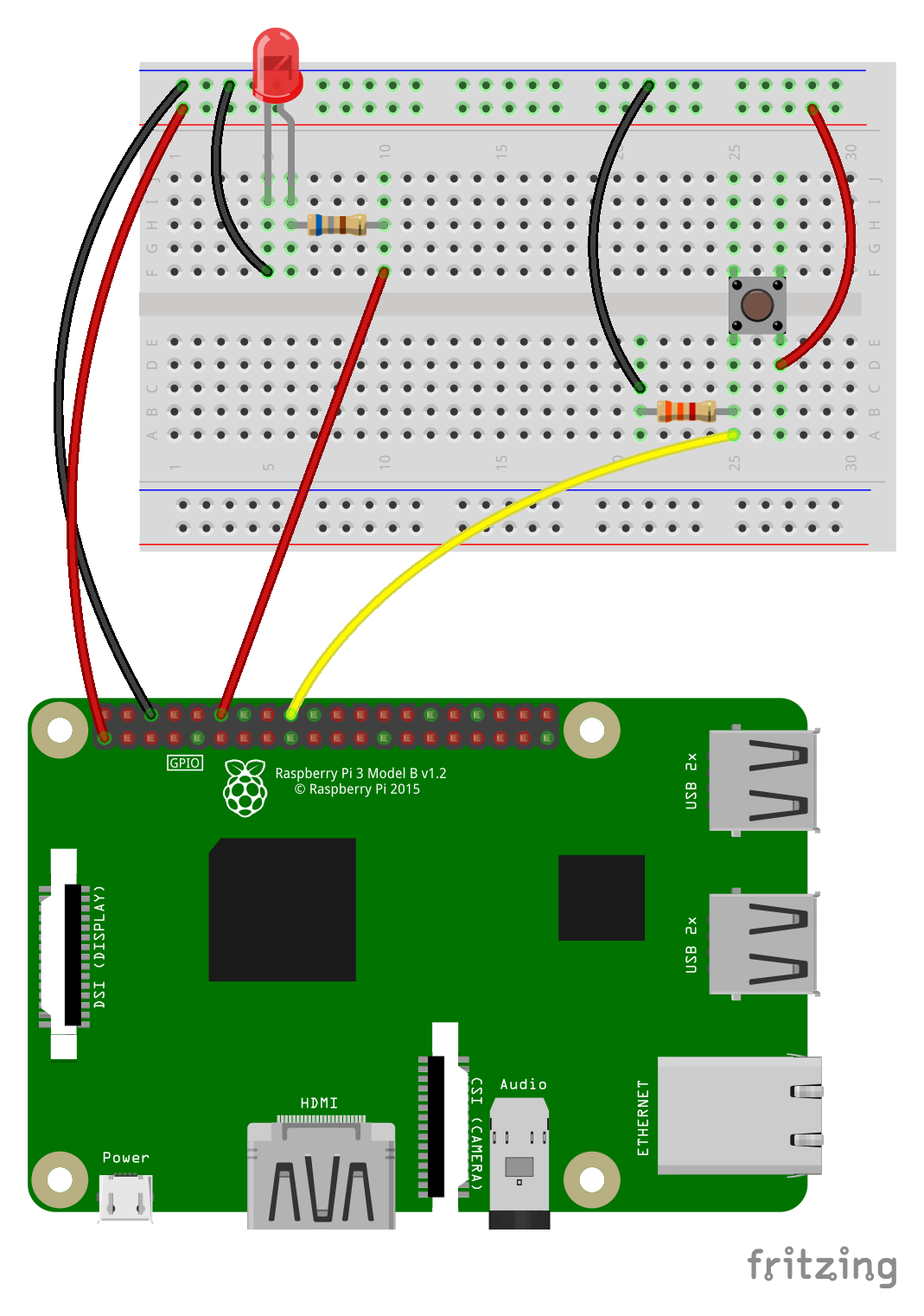
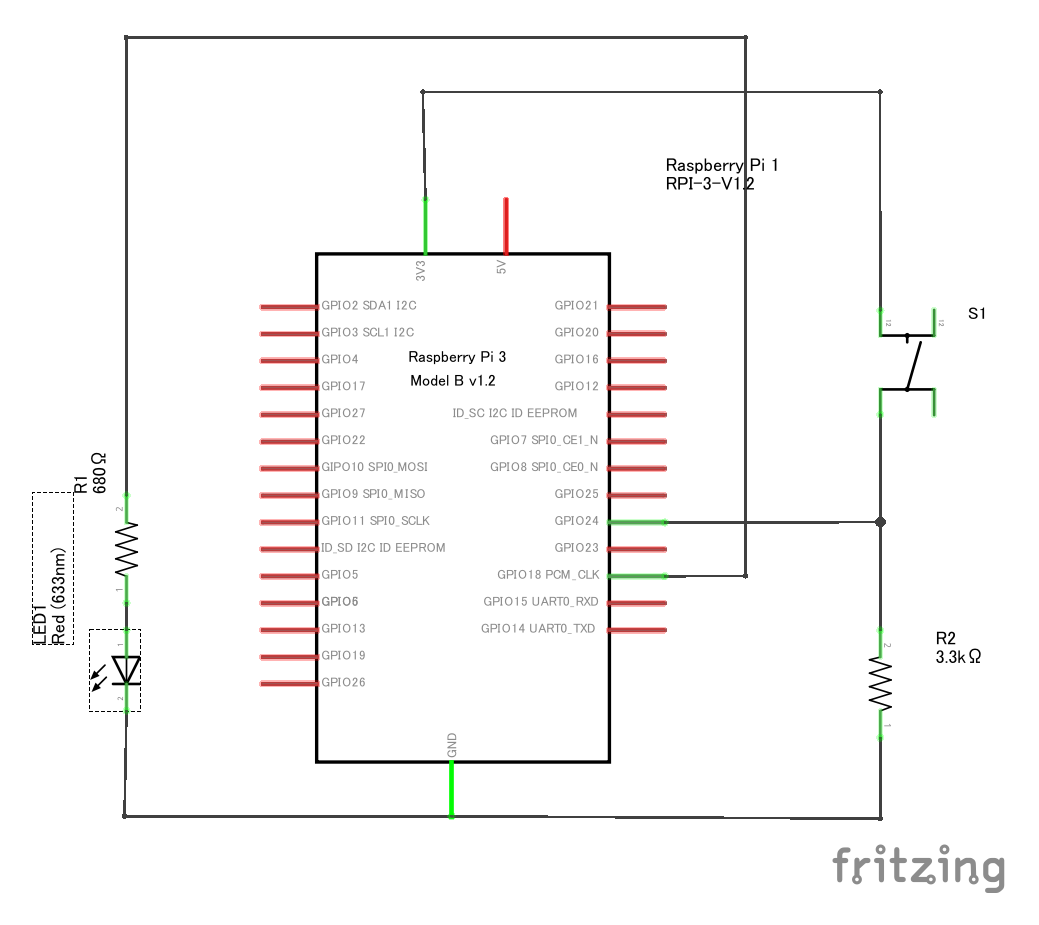
GPIO 18番にLEDを、GPIO 24番にタクトスイッチを接続。抵抗は、LED用が680Ω、スイッチ用が3.3KΩ。
lwd_sw.py として保存。
sudo python led_sw.py として実行。スイッチを押すとLEDが光った。終了は、Ctrl + C を押す。
GPIO 18番にLEDを、GPIO 24番にタクトスイッチを接続。抵抗は、LED用が680Ω、スイッチ用が3.3KΩ。
lwd_sw.py として保存。
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
from time import sleep
LED_PIN = 18
SW_PIN = 24
GPIO.setmode(GPIO.BCM)
GPIO.setup(LED_PIN, GPIO.OUT)
GPIO.setup(SW_PIN, GPIO.IN)
try:
while True:
if GPIO.input(SW_PIN) == GPIO.HIGH:
GPIO.output(LED_PIN, GPIO.HIGH)
else:
GPIO.output(LED_PIN, GPIO.LOW)
sleep(0.016)
except KeyboardInterrupt:
pass
GPIO.cleanup()
- GPIO.setup(ピン番号, GPIO.OUT) で、出力ピンに設定。
- GPIO.setup(ピン番号, GPIO.IN) で、入力ピンに設定。
- GPIO.input(ピン番号) で、ピンの入力を調べられる。GPIO.HIGH になってるか、GPIO.LOW になってるかをチェックできる。
sudo python led_sw.py として実行。スイッチを押すとLEDが光った。終了は、Ctrl + C を押す。
◎ ついでにLEDをPWM制御。 :
PWM(pulse width modulation、パルス幅変調)を使って、LEDの明るさが変化するように光らせてみる。
PWMってのは、オンにしてる時間とオフにしてる時間の比率を変化させることで、電力量を調整する方法、という説明で合ってるのかな。どうなんだろ。 _PWMとは | 東芝 ストレージ&デバイスソリューション社 の図を見れば、なんとなく分かるだろうか…。
Raspberry Piの場合、GPIO 18番がPWM制御に使える、という記述をどこかで見かけた。たしかもう1本、使えるピンがあるという話も見かけたけど…。どこだろう…。
led_pwm.py として保存。
sudo python led_pwm.py として実行。こんな感じに。
_raspberry-gpio-python / Wiki / PWM や、 _Raspberry PiでPWM制御を使ってLEDを点滅 - 忘れる前に書き残す が参考になった。
PWMってのは、オンにしてる時間とオフにしてる時間の比率を変化させることで、電力量を調整する方法、という説明で合ってるのかな。どうなんだろ。 _PWMとは | 東芝 ストレージ&デバイスソリューション社 の図を見れば、なんとなく分かるだろうか…。
Raspberry Piの場合、GPIO 18番がPWM制御に使える、という記述をどこかで見かけた。たしかもう1本、使えるピンがあるという話も見かけたけど…。どこだろう…。
led_pwm.py として保存。
#!/usr/bin/python
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
import time
LED_PIN = 18
GPIO.setmode(GPIO.BCM)
GPIO.setup(LED_PIN, GPIO.OUT)
pwm = GPIO.PWM(LED_PIN, 1000)
pwm.start(0)
try:
for i in range(3):
for dc in range(0, 101, 10):
pwm.ChangeDutyCycle(dc)
time.sleep(0.1)
for dc in range(100, -1, -10):
pwm.ChangeDutyCycle(dc)
time.sleep(0.1)
except KeyboardInterrupt:
pass
pwm.stop()
GPIO.cleanup()
- pwm = GPIO.PWM(ピン番号, 周波数) で、PWMを使うピン番号と、PWMの周波数を指定できるらしい。
- pwm.start(0) で、デューティ(時間幅) を 0 にしてる。
- pwm.ChangeDutyCycle(デューティ) で、デューティを設定できる。0(%)から100(%)まで指定できる模様。
sudo python led_pwm.py として実行。こんな感じに。
_raspberry-gpio-python / Wiki / PWM や、 _Raspberry PiでPWM制御を使ってLEDを点滅 - 忘れる前に書き残す が参考になった。
[ ツッコむ ]
#2 [raspberrypi][emacs] Raspberry Pi上にEmacsを入れようとしたけど挫折
Raspberry Pi3上でPythonスクリプトを書く際に vim を使ってたけど、やっぱり vi系は使いづらいなと。ここは多少慣れてる Emacs系のエディタを使いたいなと。
◎ Windows10上のEmacsでtrampを使おうとして挫折。 :
調べてみたら、Emacs には tramp という機能(?)があって、ftp や ssh で他のコンピュータにアクセスしてファイル編集ができるらしい。
_Windows で Emacs + tramp - 雑多な覚え書き
すると、Windows10 + NTEmacs + tramp を使えば、今までゴチャゴチャ設定しまくったEmacs環境をそのまま使って Raspberry Pi3上のファイルを編集できるということかしら。
てなわけで試してみたのだけど、これが全く上手くいかない。
環境は、Windows10 x64 + NTEmacs 24.5.1 + tramp + PuTTY付属の plink.exe。C-x C-f と打って、「/plink:ユーザ名@ホスト名#22:~」とか「/ユーザ名@ホスト名:~」とやってみると、Windows10のデスクトップ画面全体を巻き込んで固まってしまう…。dired の表示まではできるのだけど、そこから .py を開こうとしたところで固まる。なんでや。使ってる NTEmacs の版がアレなのか、~/.emacs 等で設定してる内容がいかんのか。
ちなみに、~/.emacs に書いたのは以下。PuTTY のインストール場所は、環境変数 PATH に追加済み。
以下も書いてしまうと、ますます固まる。なんでや。
_Windows で Emacs + tramp - 雑多な覚え書き
すると、Windows10 + NTEmacs + tramp を使えば、今までゴチャゴチャ設定しまくったEmacs環境をそのまま使って Raspberry Pi3上のファイルを編集できるということかしら。
てなわけで試してみたのだけど、これが全く上手くいかない。
環境は、Windows10 x64 + NTEmacs 24.5.1 + tramp + PuTTY付属の plink.exe。C-x C-f と打って、「/plink:ユーザ名@ホスト名#22:~」とか「/ユーザ名@ホスト名:~」とやってみると、Windows10のデスクトップ画面全体を巻き込んで固まってしまう…。dired の表示まではできるのだけど、そこから .py を開こうとしたところで固まる。なんでや。使ってる NTEmacs の版がアレなのか、~/.emacs 等で設定してる内容がいかんのか。
ちなみに、~/.emacs に書いたのは以下。PuTTY のインストール場所は、環境変数 PATH に追加済み。
(require 'tramp) (setq tramp-default-method "plink")
以下も書いてしまうと、ますます固まる。なんでや。
(setq tramp-shell-prompt-pattern "^[ $]+")
◎ Raspberry Pi3上でEmacsをインストールしようとして挫折。 :
これは Raspberry Pi上に Emacs をインストールして、ソレを使うしかないのかなと。しかし調べてみたところ、Raspberry Pi の apt-get でインストールできる Emacs はバージョンが古いそうで。
_Raspberry PiでEmacs 24.5とCaskを使う - Qiita を参考にして、Emacs 24.5 をインストールしてみたり。ソースをDLしてmakeしなきゃいかんらしい。ちなみに、巷の記事では make、make install に1時間半以上かかるという話だったけど、Raspberry Pi3で試したら30分もかからなかった。CPUがパワーアップしてるから、なのだろうか…?
Emacs自体はインストールできたので、前述の記事を参考に Cask なるものもインストール。ただ、Cask なんて使ったことがないから、環境構築の仕方が分からない…。
Raspberry Pi3上での Emacsの起動も、なんだか遅くて、ちょっとゲンナリ。まあ、Windows10上での NTEmacs の起動も結構時間がかかるから、これは仕方ないのかもだけど。手軽にササッと、てなわけにはいかんようだなと…。
ということで、結局のところ vim で書いたほうがいいんじゃないか、という気分になってきた。vim なら、サクッと立ち上がってくれるし…。にしても、vi系は使いづらい…。補完の仕方も分からん…。
_Raspberry PiでEmacs 24.5とCaskを使う - Qiita を参考にして、Emacs 24.5 をインストールしてみたり。ソースをDLしてmakeしなきゃいかんらしい。ちなみに、巷の記事では make、make install に1時間半以上かかるという話だったけど、Raspberry Pi3で試したら30分もかからなかった。CPUがパワーアップしてるから、なのだろうか…?
Emacs自体はインストールできたので、前述の記事を参考に Cask なるものもインストール。ただ、Cask なんて使ったことがないから、環境構築の仕方が分からない…。
Raspberry Pi3上での Emacsの起動も、なんだか遅くて、ちょっとゲンナリ。まあ、Windows10上での NTEmacs の起動も結構時間がかかるから、これは仕方ないのかもだけど。手軽にササッと、てなわけにはいかんようだなと…。
ということで、結局のところ vim で書いたほうがいいんじゃないか、という気分になってきた。vim なら、サクッと立ち上がってくれるし…。にしても、vi系は使いづらい…。補完の仕方も分からん…。
◎ tramp関係をもう少し試したり。 :
NTEmacs が固まる際に、「py-install-directory が Don't see じゃよ。readmeを読めや」とメッセージ表示されてるあたりが気になったので、もう少し調べてみたり。
試しに .txt を Raspberry Pi3 上に作ってソレを開いてみたり。…アレ? この場合は、一応開けるし、編集もできる。てことは、NTEmacs 上の python-mode の設定がアレなのかな。
ググってたら、 _how to install python-mode.el for emacs - Stack Overflow という記事に遭遇。最後のあたりで、
python-mode は…。自分の環境の場合、環境変数HOMEのパス\.emacs.d\elpa\python-mode-20160620.330 に入ってた。コレを指定しておけばいいのだろうか…分からんけど…。
指定してから試してみたら、Raspberry Pi3 上の .py が開けるようになった。むう。つまり python-mode の設定が足りてなかったのか。これでなんとかなった。のか。ホントか。どうなんだ。分からんですが。
試しに .txt を Raspberry Pi3 上に作ってソレを開いてみたり。…アレ? この場合は、一応開けるし、編集もできる。てことは、NTEmacs 上の python-mode の設定がアレなのかな。
ググってたら、 _how to install python-mode.el for emacs - Stack Overflow という記事に遭遇。最後のあたりで、
(add-to-list 'load-path "~/.emacs.d/site-lisp/python-mode") (setq py-install-directory "~/.emacs.d/site-lisp/python-mode") (require 'python-mode)という記述が。もしかして (setq py-install-directory "~/.emacs.d/〜") を ~/.emacs に記述しておけばいいのだろうか。
python-mode は…。自分の環境の場合、環境変数HOMEのパス\.emacs.d\elpa\python-mode-20160620.330 に入ってた。コレを指定しておけばいいのだろうか…分からんけど…。
指定してから試してみたら、Raspberry Pi3 上の .py が開けるようになった。むう。つまり python-mode の設定が足りてなかったのか。これでなんとかなった。のか。ホントか。どうなんだ。分からんですが。
[ ツッコむ ]
#3 [windows] PuTTYをアップデートしてみた
今まで使ってた PuTTY関連ファイルのタイムスタンプを確認したらなんだか古い感じだったので、
_PuTTY PRIVATE PATCHES
や
_PuTTY-ranvis
をDLして解凍して上書きコピーでインストールしてみたり。とりあえず、plink -V と打ってバージョンが表示される、PuTTY-ranvis をインストールしてみた。
解凍すると、ja-JP とか Japanese とかのフォルダの中に .lng ファイルがあるけど、これは .exe と同じ階層にコピーしておく。のかな。たぶん。巷の解説記事にはそう書いてあったけど。
解凍すると、ja-JP とか Japanese とかのフォルダの中に .lng ファイルがあるけど、これは .exe と同じ階層にコピーしておく。のかな。たぶん。巷の解説記事にはそう書いてあったけど。
[ ツッコむ ]
#4 [pc] Canon PowerShot A3300 IS で撮影した動画をwebm形式にしたい
手持ちのコンパクトデジカメ、Canon PowerShot A3300 IS で動画を撮影すると、おそらくは QuickTime形式の .mov として保存されるっぽいのだけど。コレを、HTML5 の videoタグで再生できるはずの、.webm 形式の動画に変換したい。…いや、webm形式を再生できるのは、Firefox や Google Chrome で、IEその他は再生できないという話もどこかで見かけたけど。
_AviUtl + _ffmpegOutプラグイン + _L-SMASH Works で、webm形式に変換できた。不要なフレームを削除できる点も助かった。
以下、参考ページ。
_【AviUtl】L-SMASH Worksとは?導入方法と使い方1【入力プラグイン】
_【AviUtl】FFmpegOUTでWebM・ASF・TS形式の動画をエンコードする方法【出力プラグイン】
ただ、L-SMASH Works r877 を入れたら、mov読み込み時に音声が妙なことに。音声部分の表示が、全部緑になってる。今まで r679 を使ってて、そちらでは音声が妙なことにはならないのだけど…。まあ、どうせ音声無しの動画として出力しちゃうから、問題は無さそうだけど。
それにしても、Appleが完全放置宣言をしてしまったWindows版のQuickTime…。これからどうするんだ…。コンパクトデジカメの類が結構使ってるのに…。
_AviUtl + _ffmpegOutプラグイン + _L-SMASH Works で、webm形式に変換できた。不要なフレームを削除できる点も助かった。
以下、参考ページ。
_【AviUtl】L-SMASH Worksとは?導入方法と使い方1【入力プラグイン】
_【AviUtl】FFmpegOUTでWebM・ASF・TS形式の動画をエンコードする方法【出力プラグイン】
ただ、L-SMASH Works r877 を入れたら、mov読み込み時に音声が妙なことに。音声部分の表示が、全部緑になってる。今まで r679 を使ってて、そちらでは音声が妙なことにはならないのだけど…。まあ、どうせ音声無しの動画として出力しちゃうから、問題は無さそうだけど。
それにしても、Appleが完全放置宣言をしてしまったWindows版のQuickTime…。これからどうするんだ…。コンパクトデジカメの類が結構使ってるのに…。
[ ツッコむ ]
2016/07/19(火) [n年前の日記]
#1 [raspberrypi] Raspberry Pi3でサーボモータを制御。その1
秋月電子から購入したマイクロサーボモータ、
_SG92R
を、Raspberry Pi3 から制御したいなと。
サーボモータってのは…。この場合は、PWMで角度を指定して動かせるモータ、という認識でいいのだろうか。 _サーボモータ - Wikipedia を眺めるとゴイスなヤツからホビー用まで色々あるらしいけど。今回使うのはホビー用。
サーボモータってのは…。この場合は、PWMで角度を指定して動かせるモータ、という認識でいいのだろうか。 _サーボモータ - Wikipedia を眺めるとゴイスなヤツからホビー用まで色々あるらしいけど。今回使うのはホビー用。
◎ 仕様をメモ。 :
とりあえず、SG92Rの仕様を秋月電子さんのサイトからコピペしてメモ。特に、PWMサイクル、制御パルスの仕様が重要。
つまり、20ms間隔でPWMを流して…。0.5ms幅のパルスを送ると -90度に、2.4ms幅のパルスを送ると90度にモータが回転してくれる、のであろうと。
SG92R : メーカー : Tower Pro Pte Ltd
PWMサイクル : 20ms
制御パルス : 0.5ms〜2.4ms
制御角 : ±約90°(180°) 配線 : 茶 = GND、赤 = 電源[+]、橙 = 制御信号 [JRタイプ]
トルク : 2.5 kgf・cm
動作速度 : 0.1秒 / 60度
動作電圧 : 4.8V(〜6V)
温度範囲 : 0℃〜55℃
外形寸法 : 23 x 12.2 x 27mm
重量 : 9g
つまり、20ms間隔でPWMを流して…。0.5ms幅のパルスを送ると -90度に、2.4ms幅のパルスを送ると90度にモータが回転してくれる、のであろうと。
◎ ピンコネクタでちょっと失敗。 :
サーボモータの端子をブレッドボードに差すために、
_細ピンヘッダ 1 x 20
も購入したのだけど。試してみたら長さが足りなかった…。もしかすると、ここは
_両端ロングピンヘッダ
なるものを購入すべきだったのだろうか…。
とりあえず、 _ブレッドボード用ジャンパーコード(オス - オス) をサーボモータ側の端子に差し込んでどうにか。
とりあえず、 _ブレッドボード用ジャンパーコード(オス - オス) をサーボモータ側の端子に差し込んでどうにか。
◎ 回路図。 :
こんな感じに。
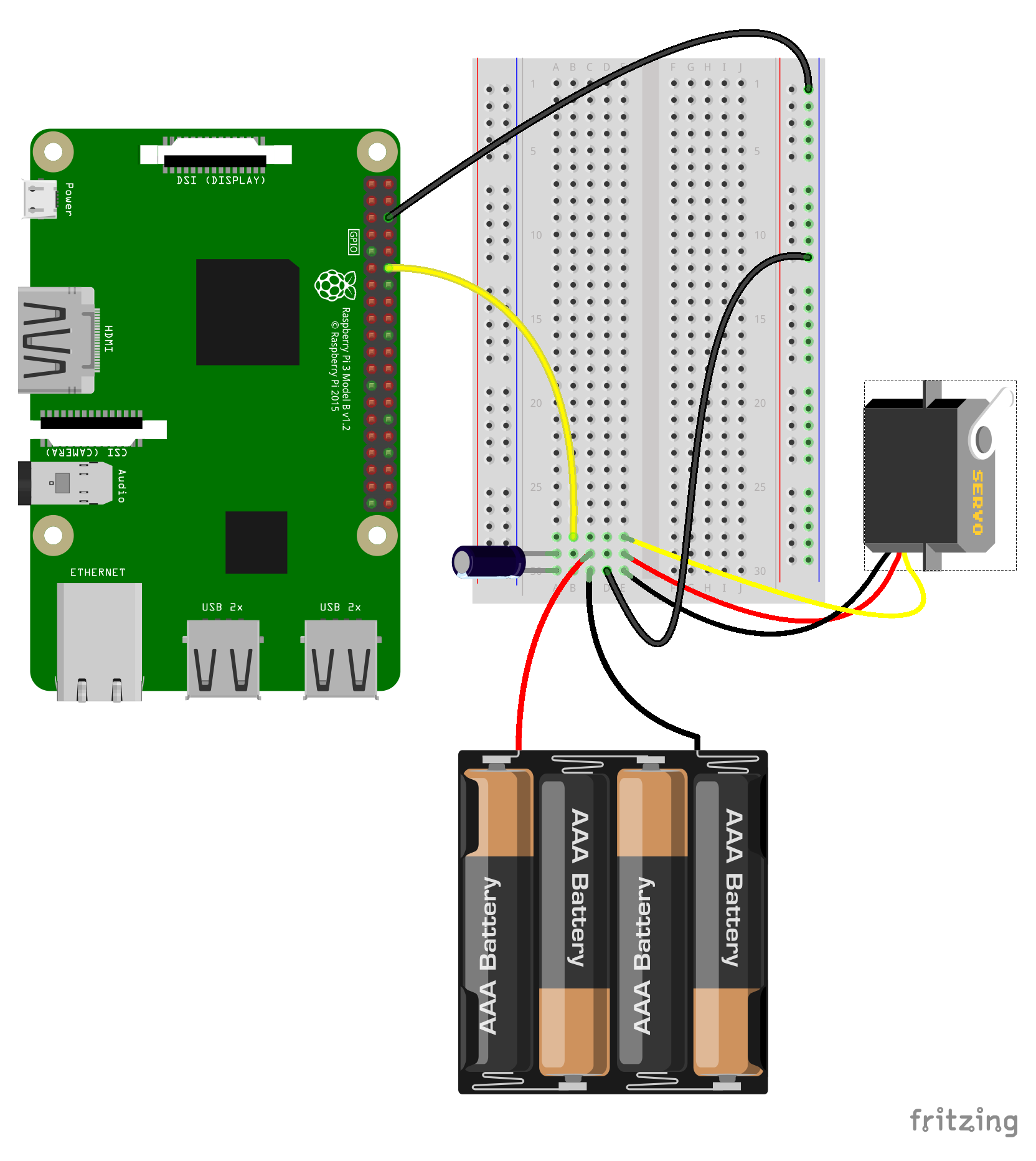
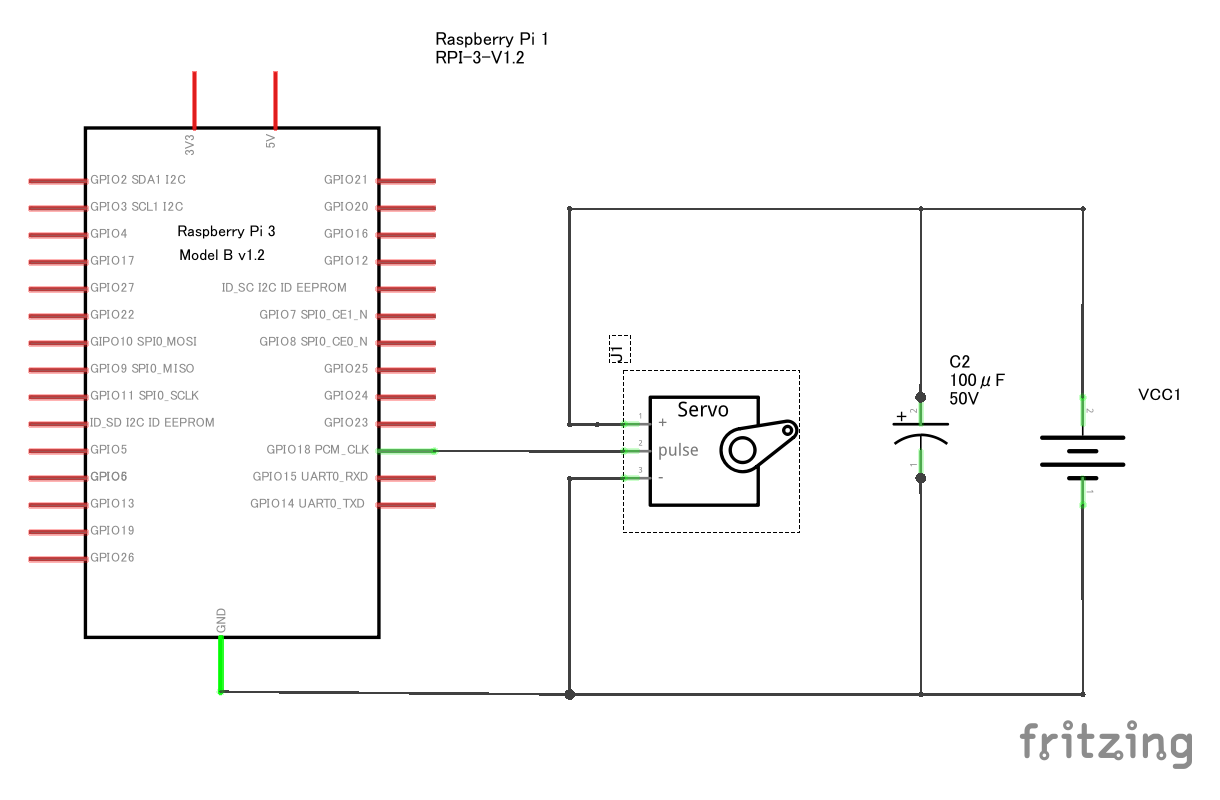
巷の解説記事を眺めてると、コンデンサや抵抗を入れる場合と入れない場合があるようで。
- Raspberry Pi3 の GPIO 18番を、サーボモータの制御信号に接続。GPIO 18番なら、PWMが使える場合が多いらしいので。
- サーボモータの電源は、単三電池 x 4 で確保。
- モータがノイズを出すらしいので、ノイズ対策としてモータの電源(VCC - GND)の間に 100uF のコンデンサを追加。コンデンサにはプラスマイナスがあるので注意。
巷の解説記事を眺めてると、コンデンサや抵抗を入れる場合と入れない場合があるようで。
- コンデンサをつけるとしても 0.1uF とか 100uF とか色々あって、どれが正しいのやら。
- Raspberry Pi3 の GPIOピンと、サーボモータの制御信号の間に、1KΩ程度の抵抗を入れる場合も。サーボモータが壊れた際に逆流しないように、という理由だとか。
◎ Pythonで動かしてみる。 :
とりあえず、LEDをPWMで光らせた時と同じやり方で ―― Python + RPi.GPIO を使う形で制御してみたり。servo_pwm.py として保存。
sudo python servo_pwm.py として実行。
動いた。
と思ったら、甘かった。指定角度で止まってくれたように一瞬見えたけど、なんだか「ジャジャッ…ジャッ…」と鳴きながら、ガクガクブルブルしている…。これじゃ使えない…。
Python + RPi.GPIO はPWM制御に関して精度がよろしくない、という話も見かけたけれど。ひょっとして、そのせいでガクブルしてしまうのだろうか…。それとも別の原因が…。
全然関係ないけど、サーボモータ上に乗せたのは _2012/05/15 に作ったペーパークラフト。机の中を探したらコレが見つかったので。
#!/usr/bin/python
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
import time
PULSE_PIN = 18
TOTAL_MS = 20.0
MIN_MS = 0.5
MAX_MS = 2.4
MIN_DCV = (float(MIN_MS) / TOTAL_MS) * 100.0 - 0.7
MAX_DCV = (float(MAX_MS) / TOTAL_MS) * 100.0 - 0.5
def get_dc(ang):
ang += 90
if ang < 0.0:
ang = 0.0
if ang > 180.0:
ang = 180.0
dc = MIN_DCV + ((MAX_DCV - MIN_DCV) * (float(ang) / 180.0))
return dc
GPIO.setmode(GPIO.BCM)
GPIO.setup(PULSE_PIN, GPIO.OUT)
pwm = GPIO.PWM(PULSE_PIN, 50)
pwm.start(get_dc(0))
try:
for ang in [0, -90, 0, 90, 0, -90, -45, 0, 45, 90, 0]:
dc = get_dc(ang)
print "ang %f , dc %f" % (ang, dc)
pwm.ChangeDutyCycle(dc)
time.sleep(3)
except KeyboardInterrupt:
pass
pwm.stop()
GPIO.cleanup()
sudo python servo_pwm.py として実行。
動いた。
と思ったら、甘かった。指定角度で止まってくれたように一瞬見えたけど、なんだか「ジャジャッ…ジャッ…」と鳴きながら、ガクガクブルブルしている…。これじゃ使えない…。
Python + RPi.GPIO はPWM制御に関して精度がよろしくない、という話も見かけたけれど。ひょっとして、そのせいでガクブルしてしまうのだろうか…。それとも別の原因が…。
全然関係ないけど、サーボモータ上に乗せたのは _2012/05/15 に作ったペーパークラフト。机の中を探したらコレが見つかったので。
◎ ServoBlasterをインストールしてみた。 :
サーボモータを制御することに特化した、ServoBlaster なるものがあるそうで。デーモンとして動くことで、比較的正確なPWM制御が可能になっているらしい。
_Raspberry PI でサーボを動かす ・ Airwhite Memo
_Raspberry Pi でサーボモータ制御 - Qiita
_Raspberry-PiにおけるGPIO関係ツールのインストール方法
_[raspberry] GPIOの制御とservoblasterの併用時 | Gerolian
_Indoor airplane world
_raspberry Pi でサーボモータ制御 | Linux & Android Dialy
コレを使えば、RPi.GPIO 使用時と違う結果になるのでは。試してみないと。
インストールは以下。
デーモンとして起動。あるいは、デーモンが起動中なら現在の状態を表示。
デーモンを終了。
ServoBlaster をインストールすると、サービスとして自動起動するように設定される。自動起動しないように設定する場合は以下。
自動起動するように設定する場合は以下。
サーボ番号と、GPIO番号の対応は以下のようになってるらしい。コピペさせてもらってメモ。
例えば、GPIO 18番のdutyを、パーセント指定で変えたければ、以下のように打つ。
パーセントではなく、パルス幅(10マイクロ秒単位)で指定することも可能。
さて。手持ちの SG92R の場合、受け付けるパルス幅は、最小 0.5ms 〜 最大 2.4ms らしいので、以下が指定できるはずだけど。
試してみたところ、実際には指定できず…。以下の範囲でしか指定できなかった。
つまり、ServoBlaster + SG92R を使う際は、-90度 = 50, 0度 = 131, 90度 = 213 を指定する感じになりそう。
さておき。前述のPythonスクリプトで制御するとガクブルだったけど、ServoBlaster を使った場合は、ちゃんとピタリと止まってくれた。状況が改善した、ような気がする。
_Raspberry PI でサーボを動かす ・ Airwhite Memo
_Raspberry Pi でサーボモータ制御 - Qiita
_Raspberry-PiにおけるGPIO関係ツールのインストール方法
_[raspberry] GPIOの制御とservoblasterの併用時 | Gerolian
_Indoor airplane world
_raspberry Pi でサーボモータ制御 | Linux & Android Dialy
コレを使えば、RPi.GPIO 使用時と違う結果になるのでは。試してみないと。
インストールは以下。
$ git clone git://github.com/richardghirst/PiBits.git $ cd PiBits/ServoBlaster/user $ make servod $ sudo make installservod てのが、コマンド名(?)らしい。
デーモンとして起動。あるいは、デーモンが起動中なら現在の状態を表示。
sudo servod
デーモンを終了。
sudo killall servod
ServoBlaster をインストールすると、サービスとして自動起動するように設定される。自動起動しないように設定する場合は以下。
sudo update-rc.d servoblaster remove
自動起動するように設定する場合は以下。
sudo update-rc.d servoblaster defaults
サーボ番号と、GPIO番号の対応は以下のようになってるらしい。コピペさせてもらってメモ。
| サーボ番号 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| GPIO番号 | 4 | 17 | 18 | 21/27 | 22 | 23 | 24 | 25 |
| P1ピン番号? | 7 | 11 | 12 | 13 | 15 | 16 | 18 | 22 |
例えば、GPIO 18番のdutyを、パーセント指定で変えたければ、以下のように打つ。
echo 2=0% > /dev/servoblaster/dev/servoblaster に何かを書き込んでやることで指定できる、ということなんだろう…。
パーセントではなく、パルス幅(10マイクロ秒単位)で指定することも可能。
echo 2=120 > /dev/servoblaster
さて。手持ちの SG92R の場合、受け付けるパルス幅は、最小 0.5ms 〜 最大 2.4ms らしいので、以下が指定できるはずだけど。
echo 2=50 > /dev/servoblaster echo 2=240 > /dev/servoblaster
試してみたところ、実際には指定できず…。以下の範囲でしか指定できなかった。
echo 2=50 > /dev/servoblaster echo 2=213 > /dev/servoblaster213より大きい値を指定すると異音がする…おそらく回りっぱなし…。本来なら 240 まで指定できそうだが…。
つまり、ServoBlaster + SG92R を使う際は、-90度 = 50, 0度 = 131, 90度 = 213 を指定する感じになりそう。
さておき。前述のPythonスクリプトで制御するとガクブルだったけど、ServoBlaster を使った場合は、ちゃんとピタリと止まってくれた。状況が改善した、ような気がする。
◎ ServoBlasterが握るピンの数を変更。 :
ところで、このままだと ServoBlaster が複数のGPIOのピンを握り続けてしまって、他の実験がちょっとやりにくくなる。今回は GPIO 18番だけを使いたいわけで…。
ということで、GPIO 18番だけを利用しなさい、他は使わんでくれ、と指定する。P1ピン番号を使って指定するらしい。
再度 sudo servod を実行すると、元のピン設定に戻ってしまう模様。
それと、sudo servod 実行時に --idel-timeout=1000 をつけると、指定時間(ms)が過ぎたらアイドル状態になる、ような設定にできる、のかもしれないけど、このあたりよく分かってない。
ということで、GPIO 18番だけを利用しなさい、他は使わんでくれ、と指定する。P1ピン番号を使って指定するらしい。
sudo servod --p1pins=12ただし、コレを一度発行すると、ピン番号が入れ替わるので注意。デフォルトでは、
echo 2=50 > /dev/servoblaster echo 2=213 > /dev/servoblasterと指定したけど、1本だけ有効状態にすると、以下のような指定になる。
echo 0=50 > /dev/servoblaster echo 0=213 > /dev/servoblaster
再度 sudo servod を実行すると、元のピン設定に戻ってしまう模様。
それと、sudo servod 実行時に --idel-timeout=1000 をつけると、指定時間(ms)が過ぎたらアイドル状態になる、ような設定にできる、のかもしれないけど、このあたりよく分かってない。
◎ ServoBlasterを使ったPythonスクリプト。 :
ServoBlaster を使った場合の Pythonスクリプトを書いてみたり。servo_pwm2.py として保存。
sudo python servo_pwm2.py として実行。
こちらもガクブルしなかった。指定角度で、ちゃんと止まってるように見える。
#!/usr/bin/python
# -*- coding: utf-8 -*-
#
# required servoblaster
import subprocess
import time
START_V = 50
END_V = 213
CENTER_V = 131
def get_pulse(ang):
ang += 90
if ang < 0.0:
ang = 0.0
if ang > 180.0:
ang = 180.0
v = float(END_V - START_V) * (ang / 180.0) + START_V
return v
try:
cmd = "servod --p1pins=12 --idle-timeout=1000"
subprocess.call(cmd, shell=True)
for ang in [0, -90, 0, 90, 0, -45, 0, 45, 0]:
pulse = get_pulse(ang)
print "ang = %f , v = %f" % (ang, pulse)
cmd = "echo 0=%d > /dev/servoblaster" % (pulse)
subprocess.call(cmd, shell=True)
time.sleep(3)
except KeyboardInterrupt:
pass
要するに、bash上で手打ちしていたコマンドを、subprocess.call() を使って再現してるだけですが。sudo python servo_pwm2.py として実行。
こちらもガクブルしなかった。指定角度で、ちゃんと止まってるように見える。
◎ pigpioを試用。 :
ServoBlaster はイイ感じにサーボモータを制御できるのだけど、コマンドを呼び出してる感がなんだか気になるわけで。
他の方法を探してみたところ、Python + RPi.GPIO ではなく、Python + RPIO ならサーボモータ専用のモジュールが既に用意されていたそうで。しかし、RPIOは随分前から開発停止状態。Pi3 や Pi2 に非対応なのだとか。残念。
ただ、RPIO関係を調べていたら、pigpio なるものがあると知り。ServoBlasterと同様にデーモンとして動く仕組みで、コマンドラインでも使えるし、Pythonから呼ぶためのモジュールも用意されているらしい。
ということで、pigpio を試用してみる。 Raspberry Pi3 の場合は、最初からインストールされてるっぽいが、入ってない時はおそらく sudo apt-get install pigpio でインストールできるんじゃないか、という気がするけど自信無し。
デーモンの起動と殺し方。
ひとまず、コマンドラインから使ってみる。pigs というコマンドを使って、GPIOに色々送れるっぽい。
GPIO 18番にサーボモータが繋がってるものとして、1.45ms のパルス幅を送る例。
パルス幅には、500 - 2500 の値を指定可能。つまり、0.5ms - 2.5ms の範囲で指定できる。
SERVO の記述は、s でも代替できる。以下は 0.5ms、2.4ms のパルス幅を送る例。
サーボモータ用のパルスを切る例。
詳細は _pigpio library を参照。
ところで、ServoBlaster を使った際は、最大値として 213 (2.13ms) までしか指定できなかったけど。pigpio (pigs) を使った場合は、2400 (2.4ms)まで指定できた。もしかするとPWMの精度に関して、ServoBlaster より pigpio のほうが高い、ということだろうか…。わからんけど。
他の方法を探してみたところ、Python + RPi.GPIO ではなく、Python + RPIO ならサーボモータ専用のモジュールが既に用意されていたそうで。しかし、RPIOは随分前から開発停止状態。Pi3 や Pi2 に非対応なのだとか。残念。
ただ、RPIO関係を調べていたら、pigpio なるものがあると知り。ServoBlasterと同様にデーモンとして動く仕組みで、コマンドラインでも使えるし、Pythonから呼ぶためのモジュールも用意されているらしい。
ということで、pigpio を試用してみる。 Raspberry Pi3 の場合は、最初からインストールされてるっぽいが、入ってない時はおそらく sudo apt-get install pigpio でインストールできるんじゃないか、という気がするけど自信無し。
デーモンの起動と殺し方。
sudo pigpiod sudo killall pigpiod
ひとまず、コマンドラインから使ってみる。pigs というコマンドを使って、GPIOに色々送れるっぽい。
GPIO 18番にサーボモータが繋がってるものとして、1.45ms のパルス幅を送る例。
pigs SERVO 18 1450オプション内容は、pigs SERVO GPIOピン番号 パルス幅(単位はマイクロ秒?)、だと思う。
パルス幅には、500 - 2500 の値を指定可能。つまり、0.5ms - 2.5ms の範囲で指定できる。
SERVO の記述は、s でも代替できる。以下は 0.5ms、2.4ms のパルス幅を送る例。
pigs s 18 500 pigs s 18 2400
サーボモータ用のパルスを切る例。
pigs s 18 0
詳細は _pigpio library を参照。
ところで、ServoBlaster を使った際は、最大値として 213 (2.13ms) までしか指定できなかったけど。pigpio (pigs) を使った場合は、2400 (2.4ms)まで指定できた。もしかするとPWMの精度に関して、ServoBlaster より pigpio のほうが高い、ということだろうか…。わからんけど。
◎ pigpioを自動起動。 :
Raspberry Pi3起動時に、pigpio が自動で起動するようにしたい。以下のページにやり方が色々載っていた。一つは crontab を使う方法。他には、サービスとして登録できるようにする方法。
_Raspberry Pi - View topic - PIGPIO daemon
とりあえず、サービスとして登録できるやり方を試してみたり。
最初に、pigpiod の場所を ―― /usr/local/bin/以下にあるのか、/usr/bin/以下にあるのか、把握しておく。
サービス起動用の雛形ファイルをコピー。
中身を編集
/etc/init.d/pigpiod の中身は、上記のサイトからコピペ。ただし、Pi3 などでは、
DAEMON=/usr/local/bin/$NAME
の行は、
DAEMON=/usr/bin/$NAME
になる。かもしれない。
サービスとして登録。
サービスの起動・終了ができるか確認してみる。
_Raspberry Pi - View topic - PIGPIO daemon
とりあえず、サービスとして登録できるやり方を試してみたり。
最初に、pigpiod の場所を ―― /usr/local/bin/以下にあるのか、/usr/bin/以下にあるのか、把握しておく。
which pigpiod
サービス起動用の雛形ファイルをコピー。
sudo cp /etc/init.d/skeleton /etc/init.d/pigpiod sudo chmod 755 /etc/init.d/pigpiod
中身を編集
sudo vi /etc/init.d/pigpiod
/etc/init.d/pigpiod の中身は、上記のサイトからコピペ。ただし、Pi3 などでは、
DAEMON=/usr/local/bin/$NAME
の行は、
DAEMON=/usr/bin/$NAME
になる。かもしれない。
サービスとして登録。
sudo update-rc.d pigpiod defaults sudo update-rc.d pigpiod enable
サービスの起動・終了ができるか確認してみる。
sudo service pigpiod start sudo service pigpiod status
sudo service pigpiod stop sudo service pigpiod status
◎ 参考ページ。 :
_サーボモーター(SG-90)を試す - Raspberry Pi 備忘録
_くたじんの鎌倉生活 RaspberryPiのPWM制御、周波数とデューティー比について
_Raspberrypi2 PWMでサーボモータを動かす | Myブーム & My備忘録
_くたじんの鎌倉生活 RaspberryPiのPWM制御、周波数とデューティー比について
_Raspberrypi2 PWMでサーボモータを動かす | Myブーム & My備忘録
pwmSetClockの値の設定についてだが、調べたところ以下の条件式が成立するらしい。ということは、50ms にしたいなら…。clock = 18750 / 50 = 375、なのかな。
- pwm周波数=raspiのPWMが持つベースクロック周波数/clock * range
- pwm周波数: 50Hz
- raspiのPWMが持つベースクロックの周波数: 19.2MHz
- range: 1024
- clock: pwmSetClockで設定する値
従ってclockを求める式は、clock = 19.2 x 10^6 / (pwm周波数 x 1024) となる。
故に、clock = 18750 / pwm周波数
[ ツッコむ ]
#2 [nitijyou] 自転車で買い物に
門のチャイムが壊れたとのことで。親父さんが線を繋ぎ直しても鳴らないのだとか。どこかで断線したままなのだろうけど、断線箇所を見つけようにも…。線は壁の中を通ってるわけで…。てなわけで、ここはワイヤレスのチャイムを買って、ソレを設置しようという話に。
ということで、ホームセンターホーマックまで電動自転車で。以下を購入。
ついでに、Seriaで以下を購入。
一応コンセントカバーは部屋に転がってるけど、小さいから引き抜くのが面倒で。その点今回購入したソレは比較的大きいので、引き抜く時に楽かなと。
セパレートボックスは、ブレッドボード用のジャンパーコードを入れるために購入したけど、長いコードは入らなかった。細長いケースが、どこかで売ってないものか…。筆記具を入れる時に便利だろうから、商品としてありそう、とは思うのだけど…。
ということで、ホームセンターホーマックまで電動自転車で。以下を購入。
- ワイヤレスチャイム REVEX X810。送信機と受信機のセット。2,000円ほど。
- スイッチ付電源タップ Panasonic WHS2523JP 3個口 2m。色はオレンジ。押した際の色でOn/Offを見分けるタイプ。1,200円ほど。
ついでに、Seriaで以下を購入。
- コンセントカバー ビジューBidart発売 6P入り。
- セパレートボックス SSサイズとSサイズの2つ。
一応コンセントカバーは部屋に転がってるけど、小さいから引き抜くのが面倒で。その点今回購入したソレは比較的大きいので、引き抜く時に楽かなと。
セパレートボックスは、ブレッドボード用のジャンパーコードを入れるために購入したけど、長いコードは入らなかった。細長いケースが、どこかで売ってないものか…。筆記具を入れる時に便利だろうから、商品としてありそう、とは思うのだけど…。
◎ REVEX X810のスペックについてメモ。 :
_リーベックス株式会社 Xシリーズカタログ
_X810・X800・X10共通 取扱説明書
送信機側の電源は、CR2032 x 2。受信機側は、単三電池 x 3。ただし受信機側は、5V 500mA のACアダプタがあれば、ACアダプタ駆動もできるらしい。
無線IDは、16段階のボリューム x 2 で設定する。16 x 16 = 256通りが選べるはず。他の御家庭と混線しないように選んでくれ、と説明書には書いてあった。
チャイム、音楽、効果音の種類は、16種類。なかなかイイ感じの音色が鳴る…。PSGっぽい音というか、ファミコンっぽい音というか…。
送信機側はネジを緩めないと裏蓋が外れない。防雨対策、なのかなと。
_X810・X800・X10共通 取扱説明書
送信機側の電源は、CR2032 x 2。受信機側は、単三電池 x 3。ただし受信機側は、5V 500mA のACアダプタがあれば、ACアダプタ駆動もできるらしい。
無線IDは、16段階のボリューム x 2 で設定する。16 x 16 = 256通りが選べるはず。他の御家庭と混線しないように選んでくれ、と説明書には書いてあった。
チャイム、音楽、効果音の種類は、16種類。なかなかイイ感じの音色が鳴る…。PSGっぽい音というか、ファミコンっぽい音というか…。
送信機側はネジを緩めないと裏蓋が外れない。防雨対策、なのかなと。
[ ツッコむ ]
2016/07/20(水) [n年前の日記]
#1 [raspberrypi] Raspberry Pi3でサーボモータを制御。その2
Raspberry Pi3 + マイクロサーボモータ SG92R で、Python + pigpio を使って制御してみたり。
_servo_pwm3.py
sudo python servo_pwm3.py として実行。こんな感じに。
動いた。かつ、ガクブルしてない。
一応ソース内の説明を少しだけ。
上記のソースでは、念のために、サーボモータにパルス幅を送ってから 0.5秒後に、該当ピンに 0 を送ってサーボモータの制御をオフにしている。この処理は必要なのか不要なのか、ちょっと分かってない。
どうして0.5秒かと言うと…。SG92R のスペックは「0.1s/60度」のはずなので、180度動かすとしても0.3秒で足りるはず。故に、0.5秒も経過すれば、目的の角度に到達してるだろうと踏んでいる。が、ホントにそうなってくれるのかどうかは分かってない。スペック上はそうなるはずだけど…。
_pigpio library を眺めると、pigpio を使えば他にも色々できる模様。
_servo_pwm3.py
#!/usr/bin/python
# -*- coding: utf-8 -*-
import pigpio
import time
SERVO_X = 18 # GPIO
START_V = 500 # us
END_V = 2400 # us
def get_pulsewidth(ang):
ang += 90.0
if ang < 0.0:
ang = 0.0
if ang > 180.0:
ang = 180.0
w = (END_V - START_V) * (float(ang) / 180.0) + START_V
return w
pi1 = pigpio.pi()
try:
for ang in [0, -90, 0, 90, 0, -90, -45, 0, 45, 90, 45, 0]:
w = get_pulsewidth(ang)
print "ang = %f , pulse width = %f" % (ang, w)
pi1.set_servo_pulsewidth(SERVO_X, w)
time.sleep(0.5)
pi1.set_servo_pulsewidth(SERVO_X, 0)
time.sleep(2.5)
except KeyboardInterrupt:
pass
print "Done."
pi1.stop()
sudo python servo_pwm3.py として実行。こんな感じに。
動いた。かつ、ガクブルしてない。
一応ソース内の説明を少しだけ。
- 事前に、sudo pigpio で、pigpioのデーモンを起動しておく。
- import pigpio で、pigpio用のモジュールをインポート。
- pi1 = pigpio.pi() で、pigpio と接続。
- pi1.set_servo_pulsewidth(GPIOピン番号, パルス幅) で、サーボモータ制御用のパルス幅を送信。パルス幅の単位はマイクロ秒(us)。
- pi1.set_servo_pulsewidth(GPIOピン番号, 0) で、該当ピンのPWM制御を切る。
- pi1.stop() で、pigpioとの接続を切る。
上記のソースでは、念のために、サーボモータにパルス幅を送ってから 0.5秒後に、該当ピンに 0 を送ってサーボモータの制御をオフにしている。この処理は必要なのか不要なのか、ちょっと分かってない。
どうして0.5秒かと言うと…。SG92R のスペックは「0.1s/60度」のはずなので、180度動かすとしても0.3秒で足りるはず。故に、0.5秒も経過すれば、目的の角度に到達してるだろうと踏んでいる。が、ホントにそうなってくれるのかどうかは分かってない。スペック上はそうなるはずだけど…。
_pigpio library を眺めると、pigpio を使えば他にも色々できる模様。
◎ ランダムに動く版を書いてみたり。 :
_servo_pwm3_2.py
「ギュイッ!」的なモータ駆動音さえなければ、何かのディスプレイに使えそうな予感。いや、「ギュイッ!」がマジでうるさくて、このままではダメだけど。
#!/usr/bin/python
# -*- coding: utf-8 -*-
import pigpio
import time
import random
SERVO_X = 18 # GPIO
START_V = 500 # us
END_V = 2400 # us
def get_pulsewidth(ang):
ang += 90.0
if ang < 0.0:
ang = 0.0
if ang > 180.0:
ang = 180.0
w = (END_V - START_V) * (float(ang) / 180.0) + START_V
return w
pi1 = pigpio.pi()
try:
old_ang = 0
for i in range(10):
while True:
ang = random.randint(0, 18) * 10 - 90
if ang != old_ang:
break
w = get_pulsewidth(ang)
print "ang = %f , pulse width = %f" % (ang, w)
pi1.set_servo_pulsewidth(SERVO_X, w)
time.sleep(0.4)
pi1.set_servo_pulsewidth(SERVO_X, 0)
time.sleep(0.1)
old_ang = ang
except KeyboardInterrupt:
pass
time.sleep(1)
pi1.set_servo_pulsewidth(SERVO_X, get_pulsewidth(0))
time.sleep(0.5)
pi1.set_servo_pulsewidth(SERVO_X, 0)
time.sleep(1)
print "Done."
pi1.stop()
「ギュイッ!」的なモータ駆動音さえなければ、何かのディスプレイに使えそうな予感。いや、「ギュイッ!」がマジでうるさくて、このままではダメだけど。
[ ツッコむ ]
#2 [raspberrypi] 電池ボックスに繋げられそうなヨサゲなコネクタは無いものか
Raspberry Pi3 でサーボモータ制御の実験をしているわけだけど、サーボモータを動かすために、単三電池 x 4、の電源を使ってるのがちょっと気になってるわけで。
電池ボックスから線が出ているわけだけど。コレを _ワニ口クリップ・ミノムシクリップ を使ってブレッドボードに接続しているのが…気になる…。何かもうちょっと抜き差しが楽な状態にできないか。つまりはヨサゲなコネクタは無いものかと。
電池ボックスから線が出ているわけだけど。コレを _ワニ口クリップ・ミノムシクリップ を使ってブレッドボードに接続しているのが…気になる…。何かもうちょっと抜き差しが楽な状態にできないか。つまりはヨサゲなコネクタは無いものかと。
◎ FAN接続用のアレはどうか。 :
この手のコネクタと言えば…。PCパーツというか、FANを接続する時に使う、
_あの3ピンコネクタ
はどうだろう。
と思ってググってみたけど、コレがなかなか売ってないようで。あんなに製品が出回ってるのに、コネクタは売ってないのか…。でもまあ、FAN関係で流れる電流なんて、えてして500mAも行かないわけで。ソレを考えると電源用コネクタとしてアレを使うのもどうなんだ、という気もしてくるなと。
と思ってググってみたけど、コレがなかなか売ってないようで。あんなに製品が出回ってるのに、コネクタは売ってないのか…。でもまあ、FAN関係で流れる電流なんて、えてして500mAも行かないわけで。ソレを考えると電源用コネクタとしてアレを使うのもどうなんだ、という気もしてくるなと。
◎ DCプラグはどうか。 :
直流用の電源コネクタと言えば、
_DCプラグ
や
_DCジャック
だろうかとも思うのだけど。
ただ、DCプラグって、今一つ規格化されてない印象があるというか…。例えば身の回りに転がってるACアダプタを眺めてみると、プラグの外側と内側の、どちらがプラスでどちらがマイナスなのか、てなところからして製品毎にてんでバラバラだったりするわけで。パッと見で、こっちがプラス、こっちがマイナスと分かる何かがいいよなと。
ただ、DCプラグって、今一つ規格化されてない印象があるというか…。例えば身の回りに転がってるACアダプタを眺めてみると、プラグの外側と内側の、どちらがプラスでどちらがマイナスなのか、てなところからして製品毎にてんでバラバラだったりするわけで。パッと見で、こっちがプラス、こっちがマイナスと分かる何かがいいよなと。
◎ microUSBはどうか。 :
それとも、Raspberry Pi と同様に、microUSBを電源コネクタとして使う、てな方向のほうが良いのだろうか…。どうやらスマホの普及で、そういう流れになりつつあるようでもあるし…。
ただ、元々のUSB規格(USB2.0)は、最大でも5V/500mA程度が流れることを前提にしているので、ソレを電源として使うのはどうなのよ、という不安もあって。とは言え、これもまたスマホの普及で、規格外の電流を流す製品が既に結構普及しちゃってるよ? てなところもありそうな。
てな感じで、電池ボックスに何のコネクタを繋げたらいいかで悩んでしまったわけです。
もっとも、電池ボックスを使うアレコレは、えてして基板に線を半田付けしてることが多いし。「持ち運びや抜き差しが便利になりそうな、電池ボックス用のコネクタとして、何がいいのだろうか」なんてのは、かなりマイナーな悩みっぽいなと。
どこかでそういうのを規格化したりしないかな。いや、既にある規格に乗ってしまうのが現実的なのかしらん。
ただ、元々のUSB規格(USB2.0)は、最大でも5V/500mA程度が流れることを前提にしているので、ソレを電源として使うのはどうなのよ、という不安もあって。とは言え、これもまたスマホの普及で、規格外の電流を流す製品が既に結構普及しちゃってるよ? てなところもありそうな。
てな感じで、電池ボックスに何のコネクタを繋げたらいいかで悩んでしまったわけです。
もっとも、電池ボックスを使うアレコレは、えてして基板に線を半田付けしてることが多いし。「持ち運びや抜き差しが便利になりそうな、電池ボックス用のコネクタとして、何がいいのだろうか」なんてのは、かなりマイナーな悩みっぽいなと。
どこかでそういうのを規格化したりしないかな。いや、既にある規格に乗ってしまうのが現実的なのかしらん。
[ ツッコむ ]
#3 [windows] AviUtlでmovをwebmに変換しようとして四苦八苦
コンパクトデジカメ Canon PowerShot A3300 IS で撮影した mov 動画ファイルを、AviUtl で webm形式の動画に変換しようとしたけど、上手く行かず。
環境は Windows10 x64 + AviUtl 1.00 + L-SMASH Works r877 + FFmpegOUT 0.05。
環境は Windows10 x64 + AviUtl 1.00 + L-SMASH Works r877 + FFmpegOUT 0.05。
◎ movの音声が正常に読み込まれない。 :
まず、mov の中に入ってる音声(PCM、サンプリング周波数 12KHz、8bit、モノラル)が AviUtl に読み込めなくて。音声表示部分が全部緑色になってる…。おそらく、導入してる L-SMASH Works で何か起きてるんだろうけど…。
これは、L-SMASH Works の設定ダイアログで、Libav + L-SMASH のチェックを外したら、音声部分もそれっぽく読み込んでくれるようになった。
これは、L-SMASH Works の設定ダイアログで、Libav + L-SMASH のチェックを外したら、音声部分もそれっぽく読み込んでくれるようになった。
◎ ffmpegでwebm出力ができない。 :
次に、webm形式の動画として出力しようとしてハマったり。FFmpegOUT で出力を試みるものの、「変なオプションついてるからエラーが出たよ。変換できねえよ」と怒られてしまう。
ffmpeg.exe は version N-81045-g450cf40。最新版をDLしてきたから、おそらく 3.0.1 以降の開発版だと思うけど。
ffmpeg 3.0.x を使ってるからいかんのかなと、 _Zeranoe FFmpeg - Builds から、ffmpeg 2.8.6 や、FFmpegOUT 0.05 が公開されてた頃の版であろう ffmpeg 2.5.2 をDLして試してみたけど、結果は変わらず。どれか特定の版を使えばスンナリ動くのだろうか。しかしググっても、「この版で動いてる」という情報が見つからない…。
とりあえず、プロファイルを選んだ時に表示される文字列の中から、-cpu-used 0 -threads 8 を削除したら出力できるようになった。が、どうしてコレが関係してくるのか、さっぱり分からない…。
ffmpeg.exe は version N-81045-g450cf40。最新版をDLしてきたから、おそらく 3.0.1 以降の開発版だと思うけど。
ffmpeg 3.0.x を使ってるからいかんのかなと、 _Zeranoe FFmpeg - Builds から、ffmpeg 2.8.6 や、FFmpegOUT 0.05 が公開されてた頃の版であろう ffmpeg 2.5.2 をDLして試してみたけど、結果は変わらず。どれか特定の版を使えばスンナリ動くのだろうか。しかしググっても、「この版で動いてる」という情報が見つからない…。
とりあえず、プロファイルを選んだ時に表示される文字列の中から、-cpu-used 0 -threads 8 を削除したら出力できるようになった。が、どうしてコレが関係してくるのか、さっぱり分からない…。
◎ ffmpegに渡すオプションについてアレコレ試したり。 :
ググってたら、
_ffmpegでエンコードしたVP9(WebM)動画をブラウザで再生してみる | potproject.net blog
という記事で、ffmpegに渡すオプションの一例が載っていた。FFmpegOUT上でも試しに設定してみたり。
_VP9 Encoding Guide - wiki も参考になりそう。
色々試してみたけど、ビットレートを指定するだけで、とりあえずパッと見はそれほどおかしくない webm を出力してくれるので、それでもいいのかもしれないなと。
-c:a libopus -b:a 64k -c:v libvpx-vp9 -b:v 2M -threads 4 -speed 4 -tile-columns 0 -frame-parallel 0 -auto-alt-ref 1 -lag-in-frames 25 -g 9999 -aq-mode 0これだとエラーが出ない…。
_VP9 Encoding Guide - wiki も参考になりそう。
-c:a libopus -b:a 64k -c:v libvpx-vp9 -b:v 0 -crf 33 -threads 8 -speed 2 -tile-columns 6 -frame-parallel 1 -auto-alt-ref 1 -lag-in-frames 25これはエラーが出る…。
色々試してみたけど、ビットレートを指定するだけで、とりあえずパッと見はそれほどおかしくない webm を出力してくれるので、それでもいいのかもしれないなと。
-c:a libopus -b:a 64k -c:v libvpx-vp9 -b:v 1Mとりあえず、64k とか 1M とか書いてあるところがビットレートの指定です。
[ ツッコむ ]
#4 [anime][neta] 「ストライクウィッチーズ」BS11放送版のOP映像がなんだかおかしい気がする
録画してたアニメを再生していて、ふとなんとなく気づいたのだけど。BS11で放送されてる、「ストライクウィッチーズ」なるアニメのOP映像がおかしいというか、妙なことになってるような気がしてきたわけで。
症状としては、画面の上から1/3のあたりに線が入ってるというか…。そこらへんを境にして、上と下で、めちゃくちゃビミョーに、まずほとんど分からないぐらいに、輝度が違ってしまっているというか。
必ずどのコマにも入ってるわけじゃなくて、どうやらスタッフ名等のテロップが表示された時に、その症状が出やすいようで。なんだろな、コレ。テロップ部分のレイヤーの範囲が画面サイズより小さい上に透明部分がビミョーに値を持ってるというかアルファチャンネルにめちゃくちゃ小さい値が残ってるのかな。でも、そんな状態なんてあるのかな。当時、テロップって、何を使って映像の上に乗せてたんだろう…。
ただ、これは元映像からしてそうなってるのか、放送波に乗った時点でそういう映像になるのか。あるいは自分が使ってる機材のバグやスペック不足なのか、そこらへん全然分かってないわけで。
ちなみに自分が使ってるのは、HDDレコーダ 東芝 RD-BZ710 + 液晶ディスプレイ MITSUBISHI RDT233WX-3D。どちらも古いから、テロップが出た瞬間に映像の輝度が変化して、内部の画像処理が何か誤動作して、画面の途中から変なフィルタをかけてる、みたいなこともありそうだなと。と言っても、他のアニメでそういう症状を見た記憶はないんだよなあ…。仮に機材がバグってるとしても、どうしてこのアニメだけが…。
まあ、件のアニメは少し古いアニメで、映像もアプコンをかけて放送してるようでもあるから画質その他を気にしてもしょうがないし。そもそも内容的にもアレだから、作業しながらBGVとして流してる状態で。故に自分としては映像面でおかしなところがあってもどうでもいいやって感じなんですけど。万が一放送版がおかしな映像だったとしても、どうせDVDやBDではちゃんとした映像になってるだろうから、ファンの人も別段困ってないだろうし…。
ただ、どうしてこういう症状が出るのかな、ってあたりが気になっただけの話で。と、メモ。
症状としては、画面の上から1/3のあたりに線が入ってるというか…。そこらへんを境にして、上と下で、めちゃくちゃビミョーに、まずほとんど分からないぐらいに、輝度が違ってしまっているというか。
必ずどのコマにも入ってるわけじゃなくて、どうやらスタッフ名等のテロップが表示された時に、その症状が出やすいようで。なんだろな、コレ。テロップ部分のレイヤーの範囲が画面サイズより小さい上に透明部分がビミョーに値を持ってるというかアルファチャンネルにめちゃくちゃ小さい値が残ってるのかな。でも、そんな状態なんてあるのかな。当時、テロップって、何を使って映像の上に乗せてたんだろう…。
ただ、これは元映像からしてそうなってるのか、放送波に乗った時点でそういう映像になるのか。あるいは自分が使ってる機材のバグやスペック不足なのか、そこらへん全然分かってないわけで。
ちなみに自分が使ってるのは、HDDレコーダ 東芝 RD-BZ710 + 液晶ディスプレイ MITSUBISHI RDT233WX-3D。どちらも古いから、テロップが出た瞬間に映像の輝度が変化して、内部の画像処理が何か誤動作して、画面の途中から変なフィルタをかけてる、みたいなこともありそうだなと。と言っても、他のアニメでそういう症状を見た記憶はないんだよなあ…。仮に機材がバグってるとしても、どうしてこのアニメだけが…。
まあ、件のアニメは少し古いアニメで、映像もアプコンをかけて放送してるようでもあるから画質その他を気にしてもしょうがないし。そもそも内容的にもアレだから、作業しながらBGVとして流してる状態で。故に自分としては映像面でおかしなところがあってもどうでもいいやって感じなんですけど。万が一放送版がおかしな映像だったとしても、どうせDVDやBDではちゃんとした映像になってるだろうから、ファンの人も別段困ってないだろうし…。
ただ、どうしてこういう症状が出るのかな、ってあたりが気になっただけの話で。と、メモ。
◎ デジタルになってからちと面倒臭い時代に。 :
それにしても、デジタル放送になってから、映像がおかしい場合にどこで問題が起きてるのか、原因をちょっと特定しづらくなったところがありそうだよなと。手持ちの機材がバグってるとか、諧調等のスペックが足りてない可能性も否定できないというか。若干面倒臭い時代になったなと。
でもないか。昔も違うところで面倒だったか。画面の端っこなんて、TVによっては映ったり映らなかったりしたもんな…。某シューティングゲームも、家庭用ゲーム機に移植された際、自機のオプション表示をアーケード版と同じく画面端にしておいたら、「このゲーム、オプション表示がそもそも見えねえ!」とクレームが次々に…。あの頃も、また違う面で、面倒臭い部分はあった…。
でもないか。昔も違うところで面倒だったか。画面の端っこなんて、TVによっては映ったり映らなかったりしたもんな…。某シューティングゲームも、家庭用ゲーム機に移植された際、自機のオプション表示をアーケード版と同じく画面端にしておいたら、「このゲーム、オプション表示がそもそも見えねえ!」とクレームが次々に…。あの頃も、また違う面で、面倒臭い部分はあった…。
◎ 画面端と言えば。 :
「エルガイム」の2番目のOPで、エルガイム MK-II が変形する時に足が切れちゃってた記憶があるのだけど…。たしか放送中はずっと直ってなかったような…。
と思ったけど。改めてググってみたら、足のところ、直ってる…。するとコレは自分の偽記憶…? それともどこかの時点で修正されてた…? あるいは自分、ダンバインあたりと混同してるのか…?
「ここから先はどうせ画面外だから描かなくていいだろ」的に線が途切れてて、仕上げの人が「ここから先は塗らなくていいのね」的に塗り残した感じの端っこが、変形した時にグイッとスライドして画面内に入ってきてた、ような記憶があるんだけど…。あの映像は…自分の偽記憶なのか…? ヤバイ。自分の脳はもうダメかもしれない。どこでそんな嘘映像が脳内発生したんだ。怖い。自分の脳がますます信用できなくなってきた。
と思ったけど。改めてググってみたら、足のところ、直ってる…。するとコレは自分の偽記憶…? それともどこかの時点で修正されてた…? あるいは自分、ダンバインあたりと混同してるのか…?
「ここから先はどうせ画面外だから描かなくていいだろ」的に線が途切れてて、仕上げの人が「ここから先は塗らなくていいのね」的に塗り残した感じの端っこが、変形した時にグイッとスライドして画面内に入ってきてた、ような記憶があるんだけど…。あの映像は…自分の偽記憶なのか…? ヤバイ。自分の脳はもうダメかもしれない。どこでそんな嘘映像が脳内発生したんだ。怖い。自分の脳がますます信用できなくなってきた。
◎ ずっと直さなかったと言えば。 :
「キャッツ・アイ」のOPで、タイトルロゴが出るときに、ヒロインの頭が一瞬つるっぱげになるのが、当時は気になって、気になって…。アレは撮影ミスだよな…。だけど、ずっと直さなかったよな、アレ…。
ググってみたら _関連記事 があった。良かった。コレは自分の偽記憶じゃなかった。自分の脳は全部がダメってわけでもなさそうです。
ググってみたら _関連記事 があった。良かった。コレは自分の偽記憶じゃなかった。自分の脳は全部がダメってわけでもなさそうです。
◎ わざと仕込めないかな。 :
今時のアニメも、たまにそういうの仕込んでおくといいかもしれず。もちろん本編でネタにする方向で。「昔と違ってデジタル制作なんだから、その気になればすぐに直せるだろ! なんで直さないんだ!」「うるせえ! スタッフは今それどころじゃねえんだよ!」「まさか…総集編」「言うな! その単語を口にするな!」みたいな会話を…。
や、「えとたま」や「鬼斬」や「ミルキィホームズ」あたりだったらできるけど、フツーのアニメではちょっとやりづらいですね。
積極的に作画ミスを利用する方向で…。主人公が放心したヒロインの肩を揺さぶりながら「しっかりしろー! ヒロインが作画崩壊しちゃダメだろー!」とか。…コレ、何かで見た記憶があるような、ないような。また偽記憶か。
そういうのって、脚本家さんは迂闊に書けないかもしれないよなと。台詞では「作画崩壊」と言ってるのに、作監さんが頑張りすぎちゃって全カットをキッチリ直してしまって意味不明のシーンになったりとか…。脚本家と作画陣の揺るがない信頼関係や、お互いの十分なコミュニケーションが求められるから、実はハードルが高いのでは…。そういうお遊びが出てきたら、スタッフの団結力を褒めるべき、かもしれず。や、分かんないですけど。
や、「えとたま」や「鬼斬」や「ミルキィホームズ」あたりだったらできるけど、フツーのアニメではちょっとやりづらいですね。
積極的に作画ミスを利用する方向で…。主人公が放心したヒロインの肩を揺さぶりながら「しっかりしろー! ヒロインが作画崩壊しちゃダメだろー!」とか。…コレ、何かで見た記憶があるような、ないような。また偽記憶か。
そういうのって、脚本家さんは迂闊に書けないかもしれないよなと。台詞では「作画崩壊」と言ってるのに、作監さんが頑張りすぎちゃって全カットをキッチリ直してしまって意味不明のシーンになったりとか…。脚本家と作画陣の揺るがない信頼関係や、お互いの十分なコミュニケーションが求められるから、実はハードルが高いのでは…。そういうお遊びが出てきたら、スタッフの団結力を褒めるべき、かもしれず。や、分かんないですけど。
[ ツッコむ ]
以上、10 日分です。