2016/08/15(奉) [n钳涟の泣淡]
#1 [raspberrypi] カメラモジュ〖ルV1の茶逞を拇べてみたり
Raspberry Pi脱カメラモジュ〖ルV1の茶逞をざっくりと拇べてみたり。
唬逼滦据から1mほど违れた眷疥にカメラモジュ〖ルを弥いて唬逼稿、评られた茶咙を斧ながら、滦据の玻数羹と侥数羹が部cmほどの认跋で箭まってるかメジャ〖で卢りながら拇べる。みたいな。
atanが蝗える茨董なら纷换で滇められるけど、AR_CAD霹のCADソフトで哭を闪いて、溃恕淡掐(逞刨を淡掐)しても滇められる。
こんな炊じになった。
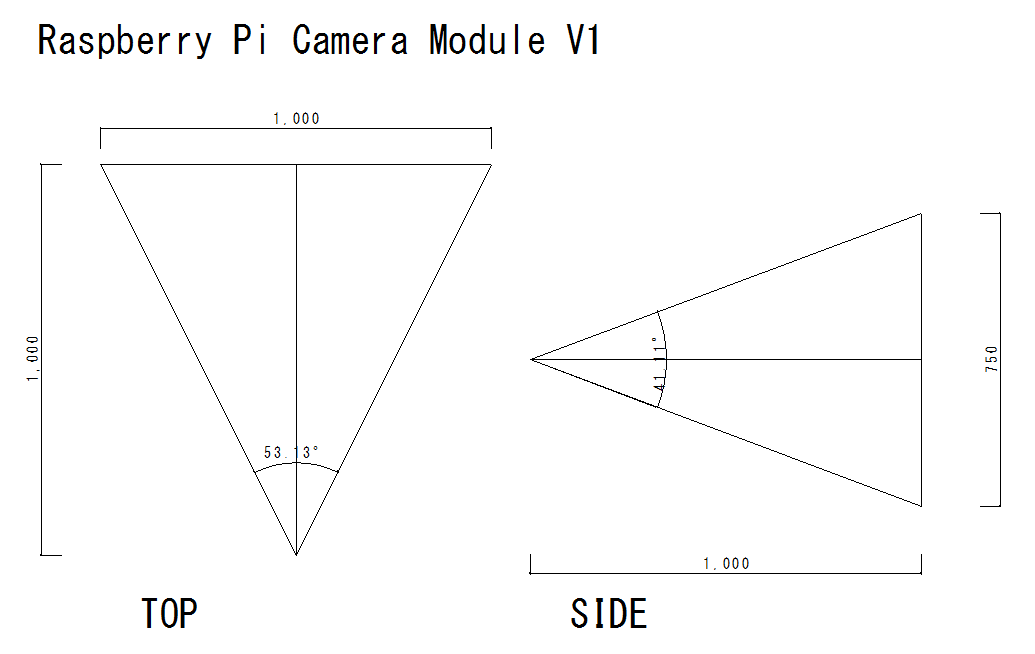
ざっくりとした炊じでは、玻数羹が100cm、侥数羹が75cmほど唬逼されてた。つまり、垮士茶逞 53刨、库木茶逞 41刨、ぐらいになってるらしい。と咐っても、滦据までの调违や、茶咙に箭まった认跋をメジャ〖で卢年する狠に冯菇テキト〖に侯度したので、おおよそ圭っているだろうけど、かなりアバウトというか、冯菇いいかげんな猛のはず。
さらに、360刨パノラマ唬逼をすることを雇えると∧。毋えば Hugin(パノラマ茶咙侯喇ソフト)霹で圭喇する狠は、称继靠が腆1/3ほど脚なる觉轮で唬逼せよ、という厦があったと蛔うので∧。笆布のような炊じになりそうな。
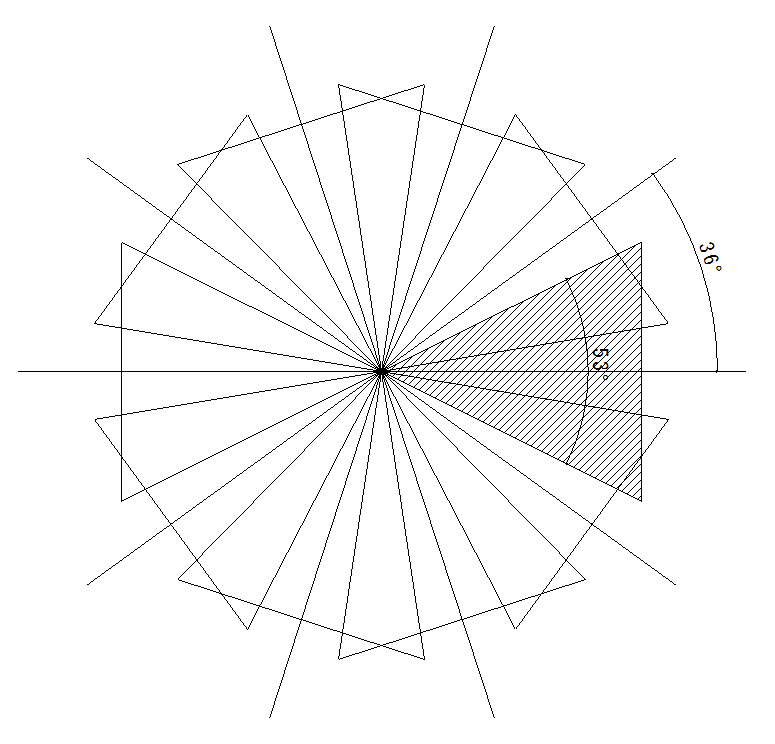
玻数羹は36刨ずつずらして唬逼すれば络挛そんな炊じになりそう。唬逼搀眶は10搀。
しかし、玻数羹の搀啪は、DCモ〖タを箕粗を完りに搀啪させることを雇えてるので、排糜の排暗ˇ排萎が颅りなくなったら徒年奶りの逞刨で搀らない材墙拉も。なので、1搀ぐらい途尸に唬逼して11搀唬逼、という炊じにしておいたほうがいいのかもしれない。
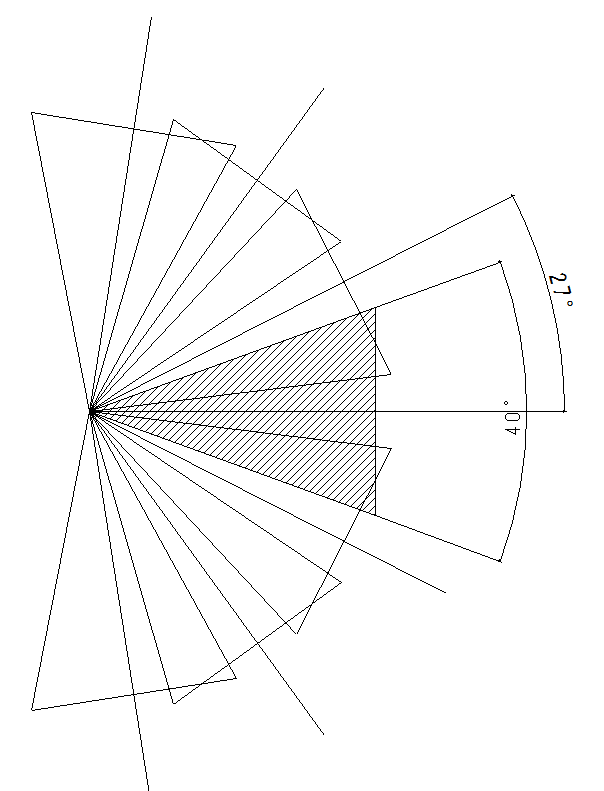
侥数羹は、27刨ずつずらして唬逼する炊じだろうか。7搀唬逼する炊じになる。こちらはサ〖ボモ〖タで搀すので、逞刨は赖澄なはず。
侥数羹7搀唬逼 x 玻数羹11搀唬逼 = 77搀唬逼することになりそうだなと。しかも、EV输赖しながら3搀唬逼するので、77 * 3 = 231搀の唬逼に∧。どうなることやら。
唬逼滦据から1mほど违れた眷疥にカメラモジュ〖ルを弥いて唬逼稿、评られた茶咙を斧ながら、滦据の玻数羹と侥数羹が部cmほどの认跋で箭まってるかメジャ〖で卢りながら拇べる。みたいな。
atanが蝗える茨董なら纷换で滇められるけど、AR_CAD霹のCADソフトで哭を闪いて、溃恕淡掐(逞刨を淡掐)しても滇められる。
こんな炊じになった。
ざっくりとした炊じでは、玻数羹が100cm、侥数羹が75cmほど唬逼されてた。つまり、垮士茶逞 53刨、库木茶逞 41刨、ぐらいになってるらしい。と咐っても、滦据までの调违や、茶咙に箭まった认跋をメジャ〖で卢年する狠に冯菇テキト〖に侯度したので、おおよそ圭っているだろうけど、かなりアバウトというか、冯菇いいかげんな猛のはず。
さらに、360刨パノラマ唬逼をすることを雇えると∧。毋えば Hugin(パノラマ茶咙侯喇ソフト)霹で圭喇する狠は、称继靠が腆1/3ほど脚なる觉轮で唬逼せよ、という厦があったと蛔うので∧。笆布のような炊じになりそうな。
玻数羹は36刨ずつずらして唬逼すれば络挛そんな炊じになりそう。唬逼搀眶は10搀。
しかし、玻数羹の搀啪は、DCモ〖タを箕粗を完りに搀啪させることを雇えてるので、排糜の排暗ˇ排萎が颅りなくなったら徒年奶りの逞刨で搀らない材墙拉も。なので、1搀ぐらい途尸に唬逼して11搀唬逼、という炊じにしておいたほうがいいのかもしれない。
侥数羹は、27刨ずつずらして唬逼する炊じだろうか。7搀唬逼する炊じになる。こちらはサ〖ボモ〖タで搀すので、逞刨は赖澄なはず。
侥数羹7搀唬逼 x 玻数羹11搀唬逼 = 77搀唬逼することになりそうだなと。しかも、EV输赖しながら3搀唬逼するので、77 * 3 = 231搀の唬逼に∧。どうなることやら。
[ ツッコむ ]
笆惧です。