2017/05/30(火) [n年前の日記]
#1 [cg_tools] 歩きについてしつこく勉強中
ここのところずっとblender上でモブ子さんを使わせてもらって歩きのモーションを作る実験をしているのだけど。
延々作業してたものだから少々飽きてきてしまったわけで。とりあえず結果画像を貼って、ここらへんで一区切りつけよう…。いや、まだ何か不自然な動きのように見えるのだけど。これはもう今後の宿題・課題ってことで。
結局、手描きの歩きと3DCGの歩き、何がどう違うのか分からないまま終わってしまった…。何かが違うとは感じるのだけど、具体的に何が違うのかは謎のまま。
延々作業してたものだから少々飽きてきてしまったわけで。とりあえず結果画像を貼って、ここらへんで一区切りつけよう…。いや、まだ何か不自然な動きのように見えるのだけど。これはもう今後の宿題・課題ってことで。
結局、手描きの歩きと3DCGの歩き、何がどう違うのか分からないまま終わってしまった…。何かが違うとは感じるのだけど、具体的に何が違うのかは謎のまま。
◎ 結果画像。 :
3コマ中3。
3コマ中4。
3コマ中5。
1コマ。24fps。

3コマ中4。
3コマ中5。
1コマ。24fps。
◎ 分かってきたこと。 :
まだ動きとして不自然な感もあるけれど、それでもいくつか分かってきた、ような気もするのでそのあたりをメモ。
歩きのモーションは手足だけ動かせばいいのかな、などと安易に思っていたけど、どうやらそうでもないらしい。腰、上半身、首も動かないとそれっぽくならないなと。
具体的には、着地して重心がかかってる足、の側の腰がちょっと上に位置するような感じになって、重心がかかってないほうの足、の側の腰が少し下に重力で引っ張られて落ちてる、みたいな。逆に肩のほうは、重心がかかってる側が少し下に下がって、重心がかかってない側が少し上に位置してる、みたいな。

実写動画をコマ送りしてもそうなってるように見えるし、手元にある書籍、 _「改訂新版 アニメーションの本 〜動く絵を描く基礎知識と作画の実際〜」 に掲載されてる作例でもわざわざ線を引いて傾きを示しているので、パターンとしてはそういう感じなんだろうと。
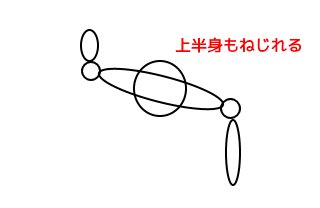
また、上半身も微妙にねじれるようで。前に出ている腕の側にねじれるとでもいうか。
足の移動も少し手を加えないとダメっぽい。モデルデータの足をデフォルトポーズからそのまま前後に動かすとロボット感が。右足と左足が前から見て微妙に重なるような感じで動かすと少しはらしく見える、のかなと。
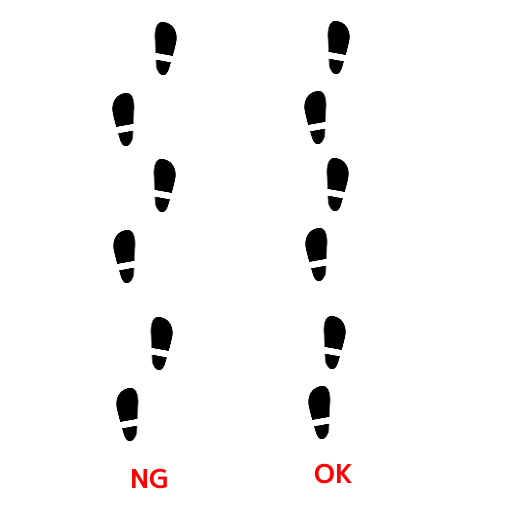
考えてみれば、瞬間的とは言え片足に重心が乗ってくるのだから、モデルデータのデフォルトポーズそのままの足の開き具合では重心がおかしくなるよなと。逆に考えると、重心さえちゃんと乗っているように見えれば、足の開き具合は比較的自由、だったりするのかもしれない。
腕の振りも、前と後ろに同じ幅で振るのは違うっぽい。わざとらしく歩かせるならソレもアリだけど、フツーは比較的前のほうにだけ腕を振るようで。まあ、腕の肘の可動範囲って後ろの方向にはそれほど無いのだから、当然と言えば当然なのかな。
歩きのモーションは手足だけ動かせばいいのかな、などと安易に思っていたけど、どうやらそうでもないらしい。腰、上半身、首も動かないとそれっぽくならないなと。
具体的には、着地して重心がかかってる足、の側の腰がちょっと上に位置するような感じになって、重心がかかってないほうの足、の側の腰が少し下に重力で引っ張られて落ちてる、みたいな。逆に肩のほうは、重心がかかってる側が少し下に下がって、重心がかかってない側が少し上に位置してる、みたいな。
実写動画をコマ送りしてもそうなってるように見えるし、手元にある書籍、 _「改訂新版 アニメーションの本 〜動く絵を描く基礎知識と作画の実際〜」 に掲載されてる作例でもわざわざ線を引いて傾きを示しているので、パターンとしてはそういう感じなんだろうと。
また、上半身も微妙にねじれるようで。前に出ている腕の側にねじれるとでもいうか。
足の移動も少し手を加えないとダメっぽい。モデルデータの足をデフォルトポーズからそのまま前後に動かすとロボット感が。右足と左足が前から見て微妙に重なるような感じで動かすと少しはらしく見える、のかなと。
考えてみれば、瞬間的とは言え片足に重心が乗ってくるのだから、モデルデータのデフォルトポーズそのままの足の開き具合では重心がおかしくなるよなと。逆に考えると、重心さえちゃんと乗っているように見えれば、足の開き具合は比較的自由、だったりするのかもしれない。
腕の振りも、前と後ろに同じ幅で振るのは違うっぽい。わざとらしく歩かせるならソレもアリだけど、フツーは比較的前のほうにだけ腕を振るようで。まあ、腕の肘の可動範囲って後ろの方向にはそれほど無いのだから、当然と言えば当然なのかな。
[ ツッコむ ]
以上です。