2016/07/27(水) [n年前の日記]
#1 [raspberrypi] ユニバーサルプレートで電動雲台の仮組み
Raspberry Pi3 でDCモータの制御が一応できたので、そろそろ電動雲台モドキの作成に近づけていきたいなと。
しかし、作るとしても、重量的な面で問題が出たりしないか不安になってきたわけで。本当に回せるのかや。てなわけで、少しテストしてみようかと。TAMIYA製ユニバーサルプレートと、養生テープを使って、ソレっぽい台を無理矢理仮組み。
一応、回転させながらカメラモジュールで撮影して、バッテリーの面で動作に問題が起きないか、そのあたりも確認したり。
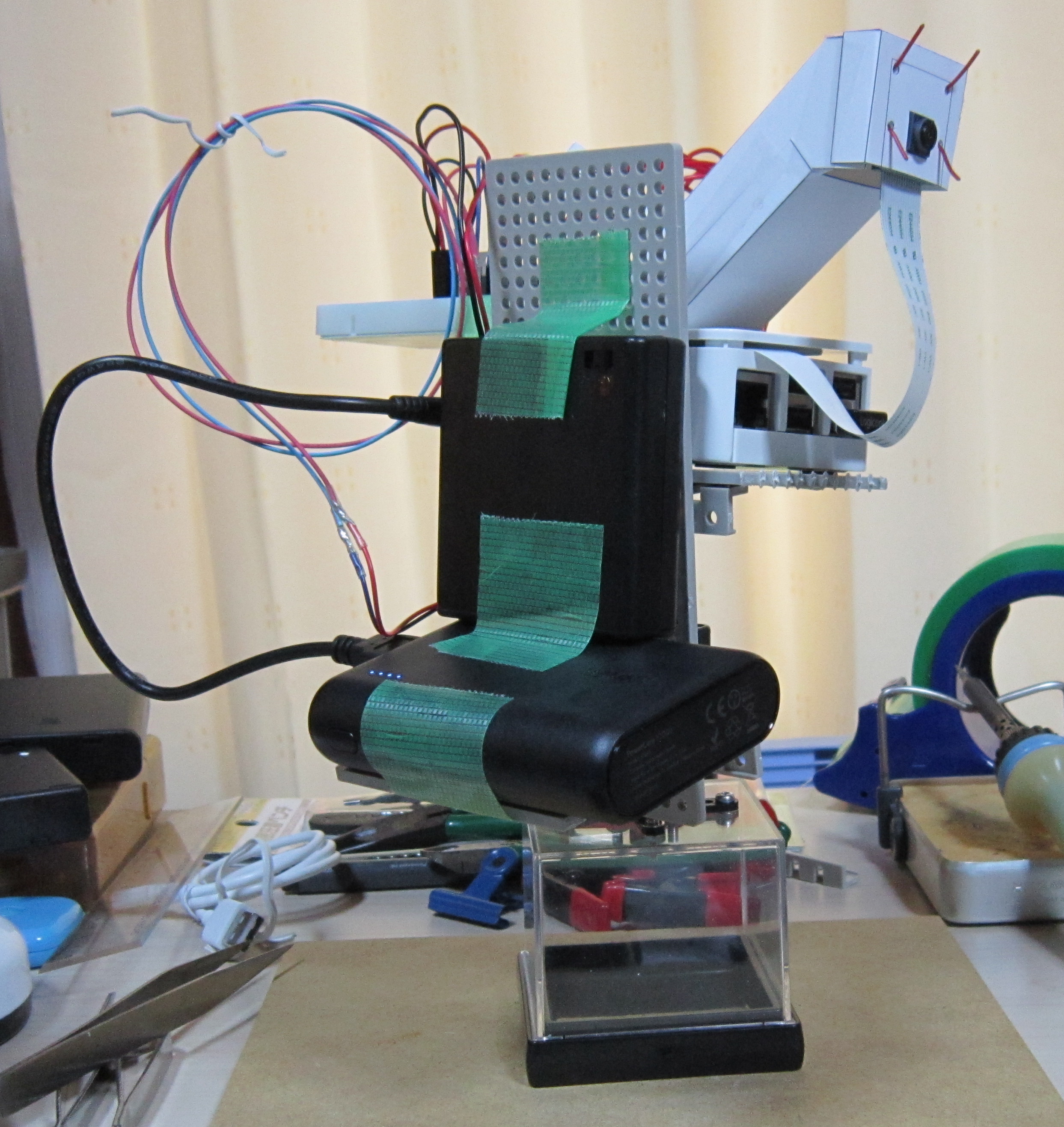
歪んでる歪んでる歪んでる。ヤバイヤバイ。強度的にヤバイ。
けど、一応回ってるな…。
Raspberry Pi3 は無線LAN子機を内蔵してるので、スクリプトの実行はメインPCからsshでログインして行っている状態で。また、今回はモバイルバッテリーで動いてるので、コイツを家の中のどこに持っていっても同じ操作ができるはずで。このあたりの感覚はなんだか面白いなと。
もっとも、現状では無線LANルータと接続できる範囲でしか動かせないけど。それと、予想通り、バッテリーの重量が厳しい…。回ってるうちにバキッと割れそうでヒヤヒヤした…。
しかし、作るとしても、重量的な面で問題が出たりしないか不安になってきたわけで。本当に回せるのかや。てなわけで、少しテストしてみようかと。TAMIYA製ユニバーサルプレートと、養生テープを使って、ソレっぽい台を無理矢理仮組み。
一応、回転させながらカメラモジュールで撮影して、バッテリーの面で動作に問題が起きないか、そのあたりも確認したり。
歪んでる歪んでる歪んでる。ヤバイヤバイ。強度的にヤバイ。
けど、一応回ってるな…。
Raspberry Pi3 は無線LAN子機を内蔵してるので、スクリプトの実行はメインPCからsshでログインして行っている状態で。また、今回はモバイルバッテリーで動いてるので、コイツを家の中のどこに持っていっても同じ操作ができるはずで。このあたりの感覚はなんだか面白いなと。
もっとも、現状では無線LANルータと接続できる範囲でしか動かせないけど。それと、予想通り、バッテリーの重量が厳しい…。回ってるうちにバキッと割れそうでヒヤヒヤした…。
◎ 制約が厳しい。 :
仮に電動雲台モドキを手持ちパーツで作るとなると、いくつか制約があって。
もし、Raspberry Piのカメラモジュールのみを回転部分の上側に設置できれば、重量面でもう少し楽になるのだろうけど…。おそらくそれは無理かなと。
というのも、カメラモジュールはケーブルが短い上に、フラットケーブルっぽい形で妙に固い一風変わったケーブルなので、好きな場所に設置できないし、ケーブルを引きずり回すわけにもいかない。となると、カメラモジュールのすぐ近くにRaspberry Pi本体も居てくれないと困るわけで。つまり、回転部分の上側に、カメラモジュールと一緒にRaspberry Pi本体を配置するしかなく。
一応、カメラモジュールの延長ケーブルも(値段は高いけど)売ってはいるので、ソレと交換すれば長さの問題は解決するはずだけど。しかしケーブルの種類が特殊なので、横方向360度グルリととぐろをまくように引き回すのは、ケーブルの固さからして無理なんじゃないかなと。…このカメラモジュール、どうしてラウンドケーブルで用意してくれなかったのか。コストの問題なのかな。
更に、Raspberry Pi3 をモバイルバッテリーで動かそうとした場合、USB電源ケーブルの選択を気を付けないと電源電圧不足になるわけで。短くて抵抗値が少ないケーブルを使うか、長いけど固くて曲がらないケーブルを使うか…。
雲台の重心について考えれば、できればバッテリーのような重いものは、回転部分の下側に置いて雲台を安定させる役目を持たせたい、が、そうなると回転部分の上側に置いてある Raspberry Pi3本体にどうやって電源を供給するのか、という問題が。横方向360度グルリと引き回せる長さと柔らかさがあって、しかも抵抗値が少ないUSB電源ケーブルなんて、おそらく売ってないよなと。となると、短いUSB電源ケーブルを使うしかなくて、つまりはバッテリーも回転部分の上側に配置することになりそうで。
加えて、 _ノーダルポイント の問題も。カメラを回転させてパノラマ画像の撮影を試みるなら、ノーダルポイントが重要になってくるわけで。つまり、横方向360度回転する軸の真上にカメラモジュールが配置されてる必要が。しかしその位置にカメラモジュールが来るような配置を考えると、Raspberry Pi本体やバッテリーが妙なところに位置することになって、全体の重心がおかしくなって雲台が倒れてしまう。
ということで、どういう形・配置にすれば解決するのか、ちょっとまだ思いついてない状態。どうしたもんか。
- 一つ。Raspberry Pi3 は、回転部分の上側に置かないといけないこと。
- 一つ。できればバッテリーも回転部分の上に置いたほうがいいこと。
- 一つ。カメラモジュールは横方向の回転軸のちょうど真上に居なければならないこと。
もし、Raspberry Piのカメラモジュールのみを回転部分の上側に設置できれば、重量面でもう少し楽になるのだろうけど…。おそらくそれは無理かなと。
というのも、カメラモジュールはケーブルが短い上に、フラットケーブルっぽい形で妙に固い一風変わったケーブルなので、好きな場所に設置できないし、ケーブルを引きずり回すわけにもいかない。となると、カメラモジュールのすぐ近くにRaspberry Pi本体も居てくれないと困るわけで。つまり、回転部分の上側に、カメラモジュールと一緒にRaspberry Pi本体を配置するしかなく。
一応、カメラモジュールの延長ケーブルも(値段は高いけど)売ってはいるので、ソレと交換すれば長さの問題は解決するはずだけど。しかしケーブルの種類が特殊なので、横方向360度グルリととぐろをまくように引き回すのは、ケーブルの固さからして無理なんじゃないかなと。…このカメラモジュール、どうしてラウンドケーブルで用意してくれなかったのか。コストの問題なのかな。
更に、Raspberry Pi3 をモバイルバッテリーで動かそうとした場合、USB電源ケーブルの選択を気を付けないと電源電圧不足になるわけで。短くて抵抗値が少ないケーブルを使うか、長いけど固くて曲がらないケーブルを使うか…。
雲台の重心について考えれば、できればバッテリーのような重いものは、回転部分の下側に置いて雲台を安定させる役目を持たせたい、が、そうなると回転部分の上側に置いてある Raspberry Pi3本体にどうやって電源を供給するのか、という問題が。横方向360度グルリと引き回せる長さと柔らかさがあって、しかも抵抗値が少ないUSB電源ケーブルなんて、おそらく売ってないよなと。となると、短いUSB電源ケーブルを使うしかなくて、つまりはバッテリーも回転部分の上側に配置することになりそうで。
加えて、 _ノーダルポイント の問題も。カメラを回転させてパノラマ画像の撮影を試みるなら、ノーダルポイントが重要になってくるわけで。つまり、横方向360度回転する軸の真上にカメラモジュールが配置されてる必要が。しかしその位置にカメラモジュールが来るような配置を考えると、Raspberry Pi本体やバッテリーが妙なところに位置することになって、全体の重心がおかしくなって雲台が倒れてしまう。
ということで、どういう形・配置にすれば解決するのか、ちょっとまだ思いついてない状態。どうしたもんか。
[ ツッコむ ]
以上です。